淄博山水水泥有限公司 山东淄博 255100
摘 要
由于机器人既可以代替的效率和工作的积极性,通过快速的反应来判断周围环境的变化,实施高效率的工作以及恶劣环境,能够优于引人工的同时不断的提高工作的效率。通过创新生产线设计,使设计能够更加符合当前工业化的需求,结合机械系统以及机械手和控制内容来进行实践性的操作和培训。
关键词:搬运机械手;结构设计;传动方案设计;受力分析;强度校核
![]()

1绪论
搬运机器人是在机械化、自动化生产过程中发展起来的一种具有取、移动相应的物体。当前电子信息技术逐步发展电子计算机,在工业上的广泛应用机器人通过深入性的拓展,融入到各行各业当中也是全新技术的一种创新,由于机器人既可以代替人工,又可以从事危险且枯燥的工作,能够有效的提高工作的效率,可用于装配件、装卸方式等,冰淇淋等全自动数控机床和组合机床被广泛使用,已成为FMS和FMC的重要组成部分,既能够适合批量性的生产,又能够适合紧凑型的发展,并且随着当前工作性质的逐步变化,能够有效的随着工作性质来发生创新和拓展,更好的适合市场的发展动向。
2总体方案设计
2.1机器人生产工艺流程分析
该机器人用于生产车间的两条自动装配线上,将产品运输到输送车上,当上一个工序直齿圆柱齿轮精加工完成后,通过质检流程检测后,通过运输带最终向装配工序的物料小车装载与运送,单个小车可放置6-8个直齿圆柱齿轮,放置完成后,当前小车沿着轨道运行,机械臂转向另一条生产线后继续完成周期任务。搬运机械手的上升抬起高度在500毫米以内要求搬运动作要灵活,臂架工作空间大,夹紧工件牢固,结构紧凑,重量轻,工作能源由发动机驱动,工件负载30kg,工件直径60毫米-280毫米,机械手手爪的开闭面积设定为50毫米-300毫米,两条装配线之间的距离为1000毫米,臂的最大延伸量约为1300毫米,可270度转动,底座固定在地板上。
 设想的工作方式如图2-1。
设想的工作方式如图2-1。
![]()

图2-1 机械手臂工作方式
Fig. 2-1 Robot arm way of working
2.2整体结构设计
2.2.1直齿圆柱齿轮搬运机械手设计总体方案要求
根据第一章的内容,根据坐标系的不同,工业机器人可分为直角坐标机器人、圆柱坐标机器人、球面坐标机器人、关节机器人和SCARA机器人。关节机器人提供广泛的应用和应用,具有以下优点:
1)工作面积大,占地面积小。
2)它具有很高的灵活性,可以完成其他类型机器人无法完成的动作,具有广泛的应用前景。
3)由于没有活动接头,所以不需要设计导轨,转动接头容易闭合,由于零部件生产规范,摩擦小,惯性小,可靠性好。
2.2.2直齿圆柱齿轮搬运机械手组成
本文设计的直齿圆柱齿轮搬运机械手主要由末端执行器(手爪部分)、腕部、小臂、大臂、腰部、底座等主要结构组成,以及大臂电机、小臂电机、大臂连杆齿轮传动机构等部分做成一个完整的直齿圆柱齿轮搬运机械手臂。
该搬运机械手由电动机驱动,传动系统主要由齿轮结构组成。其机械手具有结构简单、控制简单、使用难度低、工作效率高、成本相对较低、维护方便、无环境影响等优点。
整体结构如图2-2所示。

1-末端执行器2-手腕3-小臂结构4-大臂结构5-腰部结构6-底座
图2-2 机械手整体结构
Fig. 2-2 overall structure of manipulator
各部分组成及结构形式如下:
(1)末端执行器:通过齿轮传动的方式,经过小臂、腕部,将小臂电机提供的动力传递到末端执行器,实现对直齿圆柱齿轮的抓取。
(2)手腕:连接末端执行器和小臂的重要结构,肩负着传递动力和控制末端执行器
抓取方向的重要责任。
(3)小臂结构:连接着腕部和大臂,将动力传递到腕部,也起着承接外力的作用,
是搬运机械手的重要组成部分。
3手臂设计与校核
3.1手臂作用概述
直尺圆柱齿轮在运转过程当中主要通过搬运机械手的零部件设计,在支撑过程当中,针对支撑手腕和执行器来进行移动手臂,在运的过程当中通过手柄来运动,某一点手臂可以实施不同的运动形式,而手臂主要是由驱动电机来进行驱动的,手臂不同运动由大臂和小臂来进行共同实现,在工作过程当中通过承受手腕手抓以及动态型的载荷结构来进行直尺圆柱机械手的操作。
3.2手臂方案设计
本文设计的手臂主要分为三部分,分别为大臂、小臂、连接轴,整体结构如图3-1所示。

图3-1 手臂整体结构
Fig. 3-1 overall structure of arm
3.2.1大臂整体方案设计
大臂作为搬运机械手的起重臂在整个结构中占有重要地位,大臂主要结构如图3-2所示。

图3-2 大臂结构
Fig. 3-2 boom structure
3.2.2大臂驱动电机选择
从上面可以看出,大臂后面的每根轴的重量都是以大臂的负载计算的,因此大臂的惯性矩也不小,在确定设计方案时,必须仔细计算大臂部分的惯性矩。
大手臂转动惯量:
J2等于![]() (a2
(a2
+b2+c2+d2)+mp2
等于![]() *(0.22+0.12+0.122+0.0036)+48乘以0.352
*(0.22+0.12+0.122+0.0036)+48乘以0.352
等于5.742kg.m2
电动机的惯量
![]() kg.m2
kg.m2
减速器的惯量
![]() kg.m2
kg.m2
大臂惯量
![]() kg.m2
kg.m2
电动机的转矩
![]() N.m
N.m
M电额,要选取效率等于2.5kw,n等于1000r/min的Y-H的电机
![]()
![]()

图3-3 Y-H系列三项异步电机
Fig. 3-3 Y-H series three phase asynchronous motor
4腕部及手爪设计与校核
4.1腕部设计
手腕是直齿圆柱齿轮搬运机械手小手臂和末端驱动装置之间的连接部分。其功能是将主减速器通过自身的活动带到一定的工作空间进行维护。手腕的柔韧性直接决定了直齿圆柱齿轮搬运机械手所能完成的任务的性质和复杂性,对直齿圆柱齿轮搬运机械手手臂结构的研究具有重要意义。
前面的文章显示直齿圆柱齿轮搬运机械手用的是一个三自由度的机器手手腕,腕部主要分为三个部分:一部分由翼缘和小臂结合在一起,可以实现腕部的旋转运动;一部分围绕摆动轴。
4.1.1腕部方案设计
机械臂的腕部材料是通过特定调制的为40Cr。
因为壁厚选用45毫米,孔径选用150毫米,其端盖在安装的过程中配置在外边,而且轴承在安装的过程中配置在在轴颈上,因此GH段长数值是41毫米,直径数值是85毫米,复合轴承一般选用的是角板轴承,型号7217c,固定轴承肩高3.5毫米。
FG段可以看做是长度数值是80毫米、直径数值是92毫米的对应的一个过渡段。固定齿轮所对应的轴肩的高度的数值是6.5毫米,由于大齿轮的齿宽的数值是75毫米,所以轴头的长度必须比轮毂小,这样的情况下de段的长度选取60毫米,直径选取90毫米。。
![]()
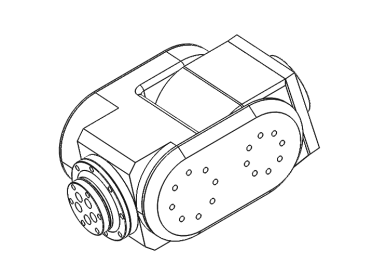
图4-1 手腕传动机构
Fig. 4-1 wrist drive mechanism

图4-2 手腕内部结构图
Fig. 4-2 internal structure of wrist
机械手腕儿在被设计时要考虑到共同性,并且通过抓取相应物品来进行水平式的放置,在旋转运动过程当中要满足相应的工作特点,所以手腕儿在设计时要进行旋转,通过齿轮与齿轮相互结合来进行科学的转动。
4.1.2手腕回转力矩的计算
1.手腕转动时所用的驱动力矩
手腕在旋转过程当中,应通过左右摆动来进行旋转,通过驱动手腕来驱动手腕所产生的扭距,以及例句手腕的转动轴和成孔要相互摩擦,其中定片儿端盖儿要保持密封,并且在转动过程当中由中心转动轴线不成合而产生偏重力矩,如下图4-3。

图4-3 手腕回转时的受力示意图
Fig. 4-3 Schematic diagram of the force when the wrist rotates
手腕转动时的计算形式
M驱等于M惯性+M偏+M摩擦+M封(4-1)
式中:
M驱——驱动力矩,kg/m;
M惯——代表惯性例句,kg/cm;
M偏——代表的是偏重力矩,kg/cm;
M摩——主要代表手腕处的摩擦力矩,kg/cm;
M封——手腕在旋转过程当中、缸径、端盖等的摩擦力矩,Kg/cm。
结束语
本次设计的直齿圆柱齿轮搬运机械手虽然已经完成了,但是还有一些不足之处,可以在以下几个方面做进一步改进:
(1)搬运机械手对于直齿圆柱齿轮的搬运存在直径上的局限性,希望今后的搬运机械手可以搬运任何直径的齿轮;
(2)在设计过程中进行的计算和校核等都是在理想状态下进行的,若在实际工作中可能还会受到其他因素的影响,可以进一步的研究分析。
(3)此搬运机械手由于尺寸原因,无法用在其他较大的生产线上或者两条距离较远的生产线上时,可进一步优化机械手臂,将尺寸扩大,进而扩大适用范围。
![]()
参考文献
[1] JZ Editor.工业机械手国内发展现状[J].玉环捷众机床,2018,(1)1-2.
[2] 涂阳龙.搬运机械手PLC控制系统[D].青岛:青岛科技大学,2010.
[3] 刘春平,张中.薄板材料及成型零件机器人搬运,定位,装配及复合加工技术[J].天津科技,2008(3):85-88.
[4] Shanahan M.Shakey and the turtle: cognitive robotics finds finds biological inspiration [Z].EPSRC/BBSRC International WorkshoP.Biologically-InsPired robotics: Legacy ofw.Grey Walter,2002.
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



