中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003
摘 要:在舰船磁场的实际测量中,定位系统的值是基于坐标北方向,磁场大小基于磁北方向,而坐标北与磁北方向的转换需要借助于真北方向进行换算。由于多个定位坐标系统的存在,使得舰船周围磁场的确定变得相对复杂,本文基于舰艇磁场动态测试方法并结合一个假设案例说明磁场数据的处理方法。
关键词:磁北,坐标北,真北,磁场,数据处理
0引 言
舰船的磁场特性是舰船物理场的重要特征,可以用于舰船识别。掌握舰船水下磁场特性对舰船的设计具有重要的指导意义。《GJB 362-2011 舰艇磁场动态测试方法》对磁场测量的原理和方法进行了介绍;在附录F中描述了数据处理方法。但是按该方法处理的数据是以舰船坐标系为基准的磁场分布,而实际测量过程中,如果舰船运行轨迹出现偏差,最终绘制舰船周围磁场分布曲线时需要对测试数据进行再次变换。本文将对《GJB 362-2011 舰艇磁场动态测试方法》中给出的数据处理方法进行解构,并在此基础上给出舰船周围磁场分布分的数据处理。
1 基本约定
1.1.测绘术语
磁北:指南针所指示的北,或者磁子午线方向,磁北由于地磁场的变化会出现一定的变化。
真北:沿着地球表面朝地理北极的方向,或者地球子午线方向,北极点为北半球所有经度线的交点。
坐标北:将地球椭圆表面投影至高斯平面直角坐标系中的纵轴;也可以理解为中央子午线方向。我国普遍使用的是1954北京或1980西安的高斯投影平面直角坐标系。
磁偏角Δ:真北方向与磁北方向的夹角。规定以真北方向为基准,东偏为正,西偏为负。
子午线收敛角γ:地球椭球体面上一点与位于此点所在的投影带的中央子午线之间的夹角(中央子午线所指的方向为真北方向)。子午线收敛角以中央子午线为基准,中央子午线以东为正,以西为负。
磁坐偏角G:坐标北与磁北方向的夹角,以坐标北为基准,东偏为正,西偏为负。
舰船坐标系:
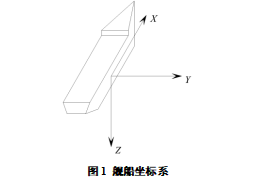
图1 舰船坐标系
以舰船艏艉连线为x轴,其中舰艏方向为正方向;以舰船左右舷方向为y轴,其中右舷为正;以右手定则确定z轴方向,即重力方向为z正。
地磁坐标系
以磁北方向为x轴正方向;y正方向为x正向水平顺时针旋转90°;z方向为垂直于xy平面向下。
大地坐标系
以坐标北方向为x轴正方向;y正方向为x正向水平顺时针旋转90°;z方向为垂直于xy平面向下。船载GPS、传感器GPS测量得到的经纬度数据将会转换到大地坐标进行分析。有关经纬度转换为大地坐标请参考文献1。
磁传感器方向
磁传感器能够测量三个方向的磁场强度大小,与传感器的位置摆放方向有关,磁传感器布放完成后,其方向角是一个定值,磁传感器在地磁坐标系中进行表征,用磁传感器x方向与磁北方向的夹角α度量。α的计算见式(1),其中Bx0,By0是地磁场在磁传感器x和y方向上的分量。
| (1) |
舰船轨迹方向
舰船轨迹方向在大地坐标系内进行度量,可以选取航迹首尾的坐标点进行表征,用角度η进行表示。根据舰载GPS航迹首尾经纬度坐标转换为大地坐标 (yend,xend),(ystart,xstart)按式(2)进行计算。
| (2) |
舰艏实时方向
舰艏实时方向在大地坐标系内进行度量,用角度λ进行表示,该值可以从舰载GPS数据上直接读取。
1.2.地磁坐标系与大地坐标系之间的转换
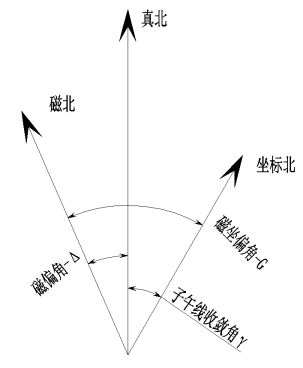
图2 三北之间的关系
地磁坐标系与大地坐标系之间的转换需要利用借助于三北之间的关系,三北之间的夹角关系如图2所示,其中磁坐偏角等于磁偏角和子午线收敛角之差,公式表达见式(3)。
| (3) |
式(3)各个角度需要考虑旋转方向的正负号,磁坐偏角以坐标北为基准线,东偏为正,西偏为负;磁偏角和子午线收敛角以真北方向为基准,东偏为正,西偏为负。磁偏角的确定和测量方法见参考文献2或者在文献6查询;有关子午线收敛角的测量参见文献3或者参考我国各地磁偏角表。
2磁场分量的变换
磁传感器测量得到的三份量记作[Bx1 By1 Bz1]T,则转换到地磁坐标下记作[Bx2 By2 Bz2]T,他们之间的计算关系如下:
| (4) |
如果转换到大地坐标系下,记作[Bxe Bye Bze]T,计算关系见式(5)。
| | (5) |
|
磁传感器布放完毕,G,α均是固定值。所以可以认为[Bxe Bye Bze]T与[Bx1 By1 Bz1]T之间存在固定转换。
而对于大地坐标系内,以坐标北顺时针任意旋转τ角度方向的磁场分量值[Bxτ Byτ Bzτ]T的换算关系如下:
| | (6) |
该任意角度τ可以是舰船轨迹方向η、舰艏实时方向λ或者其他需要的角度。
3舰船磁场分量大平面测量结果分析
表1 磁传感器经纬度坐标
传感器 | 经度 | 纬度 |
1 | 121.678104 | 31.296052 |
2 | 121.678728 | 31.296245 |
3 | 121.679352 | 31.296438 |
出于保密等原因,此假设案例仅用于说明数据处理流程。以图3所示某地地图中的黑色五角星位置为线段端点,均匀布置3台磁场测量装置,见表1。舰船以地图中线段为轨迹行进,得到以下经纬度坐标,见表2。

图3 上海某地地图
表2 舰船行驶位置经纬度
时间 | 经度 | 纬度 |
1 | 121.679451 | 31.294818 |
2 | 121.679146 | 31.295404 |
3 | 121.678759 | 31.296099 |
4 | 121.678562 | 31.296446 |
5 | 121.678328 | 31.296924 |
6 | 121.678095 | 31.297364 |
7 | 121.677834 | 31.297896 |
各传感器测量得到的磁场三分量大小如表3所示。该表格显示的传感器测得的磁场分量是在传感器自身的局部坐标系中度量的,与传感器自身的位置有关,因此需要对磁场数据进行坐标转换,由于舰船运动轨迹借助于高精度卫星导航定位,因此需要将磁场数据由局部坐标系转换至大地坐标系进行度量。
时间 | 传感器1 | 传感器2 | 传感器3 | ||||||
x | y | z | x | y | z | x | y | z | |
1 | 19.02 | 6.18 | 9.10 | 57.06 | -18.54 | 19.90 | -19.84 | 22.50 | 15.12 |
2 | 11.76 | -16.18 | 4.38 | 0.00 | -60.00 | 8.00 | -27.53 | -11.91 | 4.85 |
3 | -11.76 | -16.18 | -0.38 | -57.06 | -18.54 | 0.10 | 2.82 | -29.87 | 2.18 |
4 | -19.02 | 6.18 | -1.90 | -35.27 | 48.54 | -1.18 | 29.28 | -6.54 | 2.93 |
5 | 0.00 | 20.00 | 0.80 | 35.27 | 48.54 | 3.18 | 15.27 | 25.82 | 3.43 |
6 | 19.02 | 6.18 | 5.10 | 57.06 | -18.54 | 9.90 | -19.84 | 22.50 | 5.62 |
7 | 11.76 | -16.18 | 8.38 | 0.00 | -60.00 | 18.00 | -27.53 | -11.91 | 14.35 |
首先将舰船和传感器的经纬度坐标转换成大地坐标,运动轨迹如图4所示。
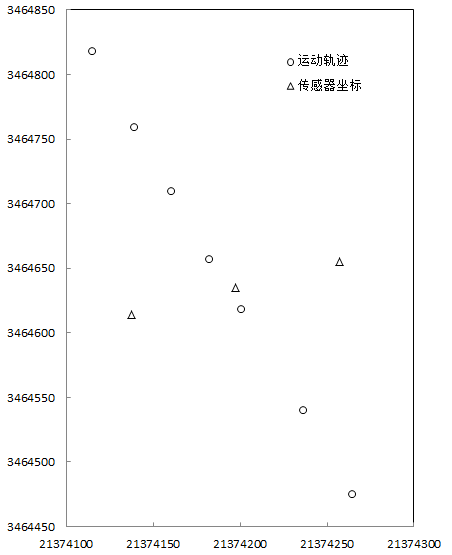
图4 舰船航行轨迹
对舰船航迹和传感器坐标进行转换,构建子坐标系,该坐标系以舰船为原点,坐标轴仍平行于大地坐标,此时传感器相对于舰船运动,得到如图5所示的运动轨迹。变换之后的传感器相对运动轨迹见表4。图5中每一点都对应着相应传感器测量的磁场数据。
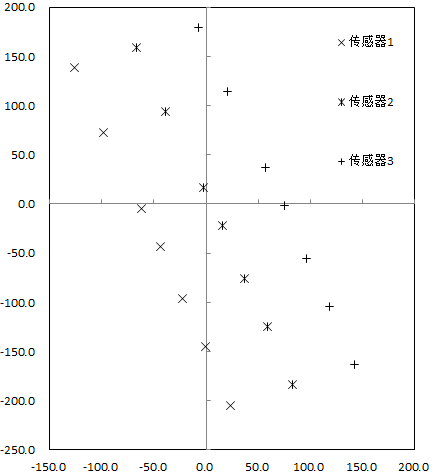
图5 传感器相对舰船运动轨迹
表4 传感器相对舰船的运动轨迹
时间 | 传感器1 | 传感器2 | 传感器3 | |||
y | x | y | x | y | x | |
1 | -126.62 | 138.38 | -66.95 | 159.07 | -7.28 | 179.75 |
2 | -98.36 | 73.05 | -38.69 | 93.74 | 20.99 | 114.43 |
3 | -62.43 | -4.46 | -2.76 | 16.23 | 56.92 | 36.92 |
4 | -44.13 | -43.17 | 15.54 | -22.48 | 75.21 | -1.79 |
5 | -22.49 | -96.44 | 37.19 | -75.75 | 96.86 | -55.06 |
6 | -0.89 | -145.50 | 58.79 | -124.81 | 118.46 | -104.12 |
7 | 23.26 | -204.79 | 82.93 | -184.10 | 142.61 | -163.41 |
该地区的磁偏角为。按照6°带高斯投影,用第二个磁传感器经纬度(121.678728,31.296245)位置计算子午线收敛角,子午线收敛角为。6°带内子午线收敛角的计算方法见公式(7):
φ=(L- L0)*sin(B) L0=6*round[(L+3)/6]-3 | 式(7) |
L,B为某一点的经度和纬度,L0为该点所在的6°带的中央子午线经度。详细参见文献4和文献5。那么该测量区域的磁坐偏角计算值为。假设三个磁场传感器的x方向与磁北方向的夹角分别为2°、3°、1°。则传感器测量数据根据式(5)转换至大地坐标系下,结果见表5。
表5 传感器测量数据转换至大地坐标
时间 | 传感器1 | 传感器2 | 传感器3 | ||||||
x | y | z | x | y | z | x | y | z | |
1 | 19.20 | 5.60 | 9.10 | 56.82 | -19.28 | 19.90 | -18.74 | 23.43 | 15.12 |
2 | 11.26 | -16.53 | 4.38 | -0.78 | -59.99 | 8.00 | -28.07 | -10.58 | 4.85 |
3 | -12.24 | -15.82 | -0.38 | -57.30 | -17.80 | 0.10 | 1.39 | -29.97 | 2.18 |
4 | -18.82 | 6.76 | -1.90 | -34.63 | 48.99 | -1.18 | 28.93 | -7.94 | 2.93 |
5 | 0.61 | 19.99 | 0.80 | 35.89 | 48.08 | 3.18 | 16.49 | 25.06 | 3.43 |
6 | 19.20 | 5.60 | 5.10 | 56.82 | -19.28 | 9.90 | -18.74 | 23.43 | 5.62 |
7 | 11.26 | -16.53 | 8.38 | -0.78 | -59.99 | 18.00 | -28.07 | -10.58 | 14.35 |
至此根据表4和表5的数据可以绘制舰船周边平面磁场分量,但这个磁场分布是舰船倾斜一个角度方向矩形区域内的磁场分布,不符合常规使用习惯,因此我们对坐标系进行旋转,式(7)给出了旋转方法,旋转角度按式(2)计算,本例中旋转角度约为-23.6°。经过坐标旋转之后,表4和表5的数据可以更新为表6和表7。
表6 传感器相对舰船的运动轨迹
时间 | 传感器1 | 传感器2 | 传感器3 | |||
y | x | y | x | y | x | |
1 | -60.64 | 177.50 | 2.33 | 172.56 | 65.30 | 167.63 |
2 | -60.89 | 106.31 | 2.08 | 101.38 | 65.04 | 96.45 |
3 | -59.00 | 20.90 | 3.97 | 15.97 | 66.94 | 11.04 |
4 | -57.73 | -21.89 | 5.24 | -26.82 | 68.21 | -31.75 |
5 | -59.22 | -79.37 | 3.75 | -84.30 | 66.72 | -89.23 |
6 | -59.06 | -132.97 | 3.90 | -137.91 | 66.87 | -142.84 |
7 | -60.67 | -196.97 | 2.29 | -201.90 | 65.26 | -206.84 |
表7 传感器测量数据转换至舰船局部坐标系
时间 | 传感器1 | 传感器2 | 传感器3 | ||||||
x | y | z | x | y | z | x | y | z | |
1 | 17.15 | -10.28 | 9.10 | 24.46 | -54.79 | 19.90 | 4.46 | 29.67 | 15.12 |
2 | -4.48 | -19.49 | 4.38 | -44.55 | -40.19 | 8.00 | -26.84 | 13.41 | 4.85 |
3 | -19.92 | -1.76 | -0.38 | -51.99 | 29.95 | 0.10 | -21.04 | -21.38 | 2.18 |
4 | -7.83 | 18.40 | -1.90 | 12.42 | 58.70 | -1.18 | 13.83 | -26.62 | 2.93 |
5 | 15.08 | 13.14 | 0.80 | 59.67 | 6.33 | 3.18 | 29.59 | 4.93 | 3.43 |
6 | 17.15 | -10.28 | 5.10 | 24.46 | -54.79 | 9.90 | 4.46 | 29.67 | 5.62 |
7 | -4.48 | -19.49 | 8.38 | -44.55 | -40.19 | 18.00 | -26.84 | 13.41 | 14.35 |
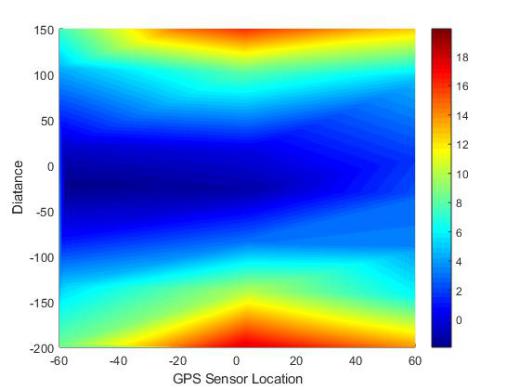
根据表6和表7的数据可以绘制处舰船磁场三个分量的大平面测量结果见图6所示。
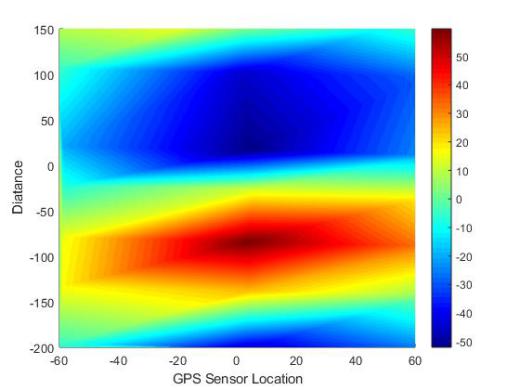
(1)x分量
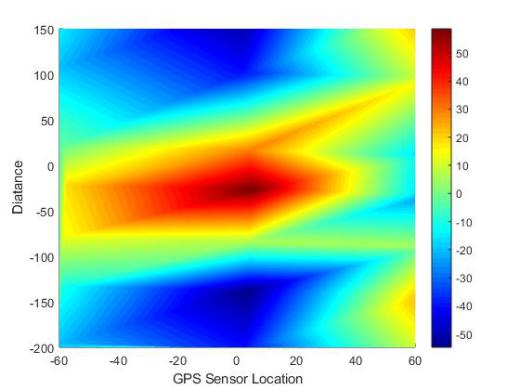
(2)y分量
(3)z分量
图6 x y z分量大平面测量结果
4结 论
本文基于《舰艇磁场动态测试方法》对舰船周边大平面磁场分布的确定方法进行描述。其中磁场数据和位置数据分别由磁场测量传感器和GPS传感器分别获得。磁场数据在磁北坐标下度量;舰船的位置通过GPS获得舰船的经纬度数据。
为了便于对舰船磁场大平面测量结果进行绘制,首先统一坐标系,将磁场度量转换到大地坐标系下进行表达。具体的转换的关键在于确定磁北方向与坐标北方向的夹角即磁坐偏角的大小。舰船的经纬度则转换为平面的大地坐标,转换的关键在于子午线收敛角的确定。
实际测量的过程中,传感器位置不变,舰船运动,在舰船大平面磁场的表达中需要进行坐标的再一次转换。将大地坐标转换到以舰船为原点的局部坐标系中进行度量,这就构成了磁场强度与传感器相对舰船坐标一一对应的数据。再通过角度的调整便可以很方便的绘制舰船周边大平面的磁场分布情况。
参考文献
[1] 成英燕,李夕银.适用于不同椭球的高斯平面坐标正反算的实用算法[C].//中国测绘学会.2004.
[2] 刘迪仁.磁偏角测量技术的最新发展[J].电子制作,2015,(4):100-101. DOI:10.3969/j.issn.1006-5059.2015.04.076.
[3] 吴永发,符才平,孙发丰.如何测定真北方向[C].//广西测绘科技信息站%广西区测绘局.全国测绘科技信息网中南分网第二十四次学术信息交流会论文集.2010.
[4] 常惠宗.谈大地坐标及子午线收敛角的计算方法[J].山西建筑,2013,39(1):183-184. DOI:10.3969/j.issn.1009-6825.2013.01.101.
[5] 刘莉莎.高斯投影分带及其中央子午线解析-3°带和6°带直角坐标差异[J].世界有色金属,2017,000(017):262-263
[6] 张国良. 矿山测量学[M]. 中国矿业大学出版社, 2016.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号