云南增股工程勘察设计有限公司 云南昆明650000
摘要:根据电力系统的时滞差异,可将其控制器信号大致划分为两类,其一是本地无时滞控制输入信号,其二则是异地多时滞控制输入信号,以此为基础可构建多时滞电力系统模型,并通过时滞分量的合理运用,将原本复杂的控制问题转化为相对直观易懂的现行矩阵不等式问题。此次在分析并设计多时滞电力系统控制器的基础上,结合仿真算例,论证该系统的应用有效性,以此能够为电力系统的多时滞控制提供实用且有效的方法,更加有效地保障电力系统的稳定与安全运行。
关键词:多时滞;广域测量;时滞分量;电力系统
前言:广域测量系统主要依托高速通信网络,在广域电网运行过程中,借助于相量测量单元采集其运行参数,并及时将参数传输至数据处理中心,从而实现对电力系统运行情况的动态、全面监控。将该系统运用至广域反馈信号控制中,可以显著改善互联系统动态性能。随着电网规模日益增大,在广域信息传输过程中,时滞有时会长至数百毫秒,对于系统稳定性造成的影响逐渐加大。而在工程控制领域中,自内点法被提出以来,线性矩阵不等式的应用价值明显提升,通过对控制问题的合理转化,能够借助于线性矩阵不等式相关知识与方法加以更好的解决。现有研究发现,基于时滞独立的系统稳定条件,能够设计出实用的状态反馈控制器;借助于线性矩阵不等式相关理论,则能够确定出时滞依赖的稳定性条件,进而设计出能够维护系统稳定的控制器;通过对广域时滞信号的有效利用,能够设计出广域自适应监视器,促进电力系统区域震荡阻尼的升高[1]。
不过目前,关于多时滞系统的控制设计,仍普遍依赖于固定的延迟时间常数,而对于本地信号无延迟的情况有所忽视。在此情况下,由于在不同通信传输通道的延迟时间有所差异,而且在其随机性特征影响下会引起电力系统的多时滞情况,若将所有控制输入信号都视为有延迟的情况,即便控制器性能较为优越,也很可能在电力系统中失效[2]。因此,在对广域控制信号进行分析时,有必要考虑其是否存在延迟以及具体的延迟参数,进而再为线性多时滞电力系统推导出适宜的稳定判据,最后根据相应的控制参数及最大时滞等数据,设计出实用的时滞控制器。
1 电力系统多时滞建模
1.1电力系统建模
结合多机电力系统特点,为其建立模型动态方程如公式(1)
①dδi/dt=ω0(ωi-1);
②dωi-/dt=1/TJi·[Pmi-Pei-Di(ωi-1)]
③d![]() /dt=1/
/dt=1/![]() ·[-
·[-![]() -(xdi-
-(xdi-![]() )Idi+Efdi] (1)
)Idi+Efdi] (1)
④dEfdi/dt=1/TAi(-Efdi-KAiUti+KAiVsi)
当达到平衡运行点时,对于向量xi=(Δδi,Δωi,Δ![]() ,ΔEfdi)T,可将其值定义为(Δδi0,Δωi0,Δ
,ΔEfdi)T,可将其值定义为(Δδi0,Δωi0,Δ![]() ,ΔEfdi0)T,由此可推导,当多机电力系统位于平衡点时,其动态方程可如公式(2)所示,
,ΔEfdi0)T,由此可推导,当多机电力系统位于平衡点时,其动态方程可如公式(2)所示,
 =
= +
+ (2)
(2)
其中,下表i指代第i台发电机,δ、ωi和ω0分别代表发电机的功角、角速度以及同步转速,xdi和![]() 分别代表轴的暂态电抗与同步电抗,
分别代表轴的暂态电抗与同步电抗,![]() 代表暂态开路状态下的时间常数,
代表暂态开路状态下的时间常数,![]() 代表发电机暂态电动势,Di则代表阻尼系数。以此为基础,当处于运行点附近且扰动较小时,多机电力系统方程可表示为公式(3):
代表发电机暂态电动势,Di则代表阻尼系数。以此为基础,当处于运行点附近且扰动较小时,多机电力系统方程可表示为公式(3):
①![]() (t)=A1x1(t)+B1u(t)
(t)=A1x1(t)+B1u(t)
②y(t)=C1x1(t) (3)
其中,y指代电力系统的测量输出值,C1指代测量输出矩阵,在能够以状态空间形式表现时,可按如下公式(4)表示输出反馈控制器:
①![]() (t)=Ak
(t)=Ak![]() (t)+BKy(t)
(t)+BKy(t)
②u(t)=CK![]() (t)+DKy(t) (4)
(t)+DKy(t) (4)
其中![]() 代表控制的状态,AK、BK、CK、DK分别指代控制器中不同的参与矩阵,具体参数有待确定。
代表控制的状态,AK、BK、CK、DK分别指代控制器中不同的参与矩阵,具体参数有待确定。
1.2多时滞电力系统建模
在闭环控制系统中,通常会设有至少两层控制系统,其一是本地阻尼控制,其二则是广域阻尼控制,二者均位于发电机励磁系统上[3]。设机组反馈信息产生的时滞为τij,其数值通常很小,当i=j时,τij=0,若时滞由广域信号产生,则i≠j。此时可将系统总反馈控制输入情况按如下公式(5)表示,而闭环时滞电力系统模型如公式(6)所示:
u(t)=uL(t-τij)+uW(t-τij) (5)
![]() (t)=Ax(t)+
(t)=Ax(t)+![]() (6)
(6)
2 多时滞分量的输出反馈控制器设计
2.1本地控制器设计
本地控制器将机组转数作为输出信号,该情况下的传输时滞值为零,可将其看作一般控制系统,并将电力系统模型以公式(7)表示:
![]() (t)=A2x2(t) (7)
(t)=A2x2(t) (7)
2.2忽略时滞分量影响的广域控制器设计
在电力系统实际运行时,可参照公式(6)表示闭环状态下的系统模型,进而计算分析出控制器的参数矩阵,如公式(8)所示:
①DKW=![]() ;
;
②CKW=![]() (MT)-1;
(MT)-1;
③BKW=N-1(![]() -YB1DKW); (8)
-YB1DKW); (8)
④A
KW=N-1(![]() -YA2X)(MT)-1-N-1YB1DKW
-YA2X)(MT)-1-N-1YB1DKW
2.3需要分析时滞分量影响的广域控制器设计
在多时滞系统中,若存在PT、RT两个参数的取值范围在0~Rn×n之间,且能够使如下公式(9)成立,则表明电力系统处于渐进稳定状态。
 <0 (9)
<0 (9)
通过变量替换方法的应用,还可得出新变量的值[4]。在此基础上,基于变量间的替换关系,则可计算得出广域控制器中的参数矩阵,具体包括AKW、BKW、CKW、DKW。
3 仿真算例
为具体论证所设计控制器的有效性,此次引入如图1所示的两区域四机系统,每台发电机均配有励磁系统,图中G1和G3作为主导机组。
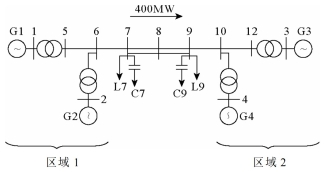
图1 两区域四机电力系统
在本地控制器应用中,系统全部特征值的实部均是负值,但系统中还是存在低频振荡区间,阻尼系数可达到0.1。对此,有必要通过增加广域阻尼的方式,以对区间低频振荡加以有效抑制。
在不考虑时滞分量的情况下,引入线性矩阵不等式理论,在对线性不等式可行性的求解过程中,便能够计算得出电力系统可接受的时滞最高值。当无广域控制器时,电力系统运行看似稳定,但对于低频振荡的控制效果并不理想;而在配置广域控制器时,最大时滞数值较高且系统不够稳定。由此,此次为广域控制器所提出的计算方法较为有效。
在考虑时滞后分量的情况下,随着时滞分量数值的不断升高,广域控制器的控制性能随之提升,不过与此同时,受时滞分量增加影响,线性矩阵不等式的求解难度也在升高。当时滞分量r=2时,控制器的控制效果最佳。因此,在为电力系统设计时滞控制器时,有必要对时滞分量的取值进行适当限制。
结语:此次根据多时滞电力系统常见的两种控制方式,构建出相对新颖且实用的系统模式,并结合线性矩阵方法,设计了包含时滞分量的多时滞控制器。该控制器的合理设计及有效运用,能够显著发挥出本地控制器的控制功能,并由时滞控制器提供辅助,对系统中的区域间振荡加以有效抑制。随着时滞分量的升高,系统保守性逐渐减小,广域控制器的性能发挥更加显著,但同时线性矩阵不等式的求解难度也会加大,因此在设计及应用中,应对合理设定时滞分量的取值范围,以促进多时滞控制器功能的充分发挥。
参考文献:
[1]郭建锋,钱伟,费树岷等.基于优化泛函的多时滞广域电力系统稳定性分析[J].电力系统保护与控制,2023,51(12):47-57.
[2]郭良栋,张旺.基于积分不等式的多时滞电力系统稳定性分析[J].辽宁科技大学学报,2021,44(06):470-476.
[3]彭思源.基于广域测量技术的电力系统时滞相关稳定性分析[D].湖南工业大学,2021.
[4]张慧,叶华,李常刚等.一种改进的时滞电力系统特征值高效计算方法[J].山东大学学报(工学版),2022,52(05):44-54.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号