37050219950181644
青岛港湾职业技术学院山东省青岛市266404
摘要:本文介绍了气动肌肉的发展历程、主要特点和使用形式,探讨了国内外气动肌肉的应用场景,最后进行了问题总结和展望。
关键词:气动人工肌肉;特性
1、引言
气动肌肉是一种具有类似人类肌肉输出特性的柔性执行器,它是根据人类肌肉的运动原理设计而成,主要由橡胶管和编织网组成。当气动肌肉充气时,内部的橡胶管开始膨胀,导致编织网的螺旋形纤维与橡胶管轴线之间的角度增加,而轴向长度减小。气动肌肉既具有清洁、质量轻、价格低、易维护等气动元件的优点,与气缸相比,还具有较大的功率、功率体积比、质量比,并且由于其力——位移关系特性与人类肌肉特性相似而具有很好的柔顺性。因此,气动肌肉在机器人、工业自动化和仿生机械中具有广泛的应用前景。
2、气动肌肉发展历程
气动肌肉是从人工肌肉发展而来,目前气动肌肉的种类繁多。最早的雏形出现在1936年美国Pierce的专利中,其结构原理和McKibben型气动肌肉十分相似,但其工作原理却是利用径向膨胀而不是轴向收缩将煤块捣碎,目的是在采煤工业中替代黄色炸药。而且,其工作介质是液压油而不是气体。
1949年美国De Haven提出一种利用气动肌肉轴向收缩的张力调整装置。这种气动肌肉不论从结构原理还是从工作原理都与McKibben型气动肌肉几乎一样,但是其压缩空气不是来自压缩机,而是来自装置内部点燃火药产生的压缩空气。
1958年美国Gaylord基于同样的原理提出了一个专利,对整个系统进行了数学分析,并给出了第一个描述力大小的方程。
同一时期,美国医生J.L.McKibben将气动肌肉用于能够辅助残疾手指运动的气动装置,后人大多数认为McKibben型气动肌肉标志着气动肌肉的出现。
1962年,美国Schulte详细分析了McKibben型气动肌肉的特性,并进行了大量的数学分析,其借鉴了Gaylord专利中的分析结果。尽管这种系统似乎在康复领域非常有前途,但由于供气困难和连续控制困难导致在其应用领域一度被电马达替代。
1986年,日本Bridgestone公司申请了用于机械手的气动肌肉专利,称为Rubberuator,并将之应用于两种工业机器人RASC和Soft Arm进行商业化。
90年代末期,德国Festo公司推出了一种新的气动肌肉,称之为Fluidic Muscle,其最大的特点是将编织网嵌入橡胶管的橡胶中,这样能够大大增强气动肌肉的疲劳寿命。英国Shadow公司生产McKibben型气动肌肉,称之为Air Muscle,并将气动肌肉制作成灵巧手,大批量地应用于生产实际中。比利时Frank博士设计了一种新型的气动肌肉,称之为pleated pneumatic artificial muscle,大大提高了气动肌肉的收缩比和收缩力。
3、气动肌肉主要特点
气动肌肉与其他执行器相比,主要具有以下特点:
1)气动肌肉的收缩位移大概在20∼35%之间,与人类肌肉接近。
2)气动肌肉的长度可根据用户的需求任意裁剪,大大地方便了系统设计。
3)气动肌肉主要由橡胶和细的金属格栅网组成(FESTO产品),重量轻;且其初始输出力是同缸径气缸的10倍;因此,功率/质量比很大。例如,直径40mm、长度600mm(FESTO产品)的气动肌肉(包括接头)重量约为1.2kg,而最高输出力可达4000N。
4)气动肌肉结构简单、安装方便,系统装配时无需对中。
5)气动肌肉中没有活塞、活塞杆、动密封等诸多零部件,无需润滑,无粘滑特性和爬行现象,可实现慢速运动。
6)气动肌肉柔顺性好,与环境接触友好。
7)气动肌肉使用安全,其主要失效形式为橡胶管破裂,因此一般不会造成严重后果。
8)气动肌肉空气消耗小,与能产生相等力的气缸相比,耗气量仅为普通气缸的40%。特别是在闭环的连续控制时,不像气缸同时进排气实现运动,而只有一个气腔充气或放气,故更加节能。
9)气动肌肉密封性好,无内泄漏,且抗污染能力强。
10)气动肌肉实际上是一种人工肌肉,大部分产品在低压时还可以用液体作为工作介质。气动肌肉的输出力在零收缩时达到最大,在最大收缩量时达到零,其力——位移——压力关系曲线具有较强的非线性。
4、气动肌肉的使用形式
在人类肌肉中,相对于某块肌肉或肌群的另块肌肉或肌群,由于配置上的原因,具有相反的运动和张力效应,在力学上起对抗作用,称二者互为颉颃肌。气动肌肉亦是如此,单根气动肌肉只能提供拉力,因此需将气动肌肉与拉伸弹簧联合使用或者多根气动肌肉成组使用实现正反两个方向的运动。
5、气动肌肉的应用场景
|
|
|
|
5.1 | 5.2 | 5.3 | 5.4 |
|
|
|
|
5.5 | 5.6 | 5.7 | 5.8 |
5.1夹紧金属板
气动肌腱可轻松地夹紧大而笨重的工件,如板材、墙板、侧盖等,以便进行加工(切削、钻、铣)。这利用了气动肌腱出色的特性,如拉力大、直径小、无摩擦且无抖动运动、耐脏(碎屑、研磨颗粒)和气密封的结构。
5.2夹紧待结合部件
诸如在焊机中的结合过程,待焊接元件由气动肌腱夹持到位。这里,气动肌腱同样发挥了其拉力大且直径小的特性。
5.3分配
在给固定物载体喷粘性涂层剂时,需要振动来确保表面涂层均匀分布。在行程小于1mm的情况下,气动肌腱的循环速度可达150Hz。
5.4传送
气动肌腱特别适用于运输或校准部件。可方便并独立地调节幅度和循环速度。气动肌腱的灵活性可实现为任意传送过程设置最佳传送速度。
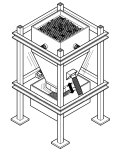
5.5释放
料斗和筒仓最容易出问题,例如在进料时出现“堵塞弧”。在实际应用中,采用诸如振动装置或敲击装置辅助释放,防止出现堵塞。通过气动肌腱可实现这样的功能。无限可调的频率最大可设置到150Hz,与幅度相互独立,确保了连续的传送过程。
5.6应力平衡
在采用滚轮运输或卷绕线、薄膜、纸张或胶带的场合中,会产生高应力(应力峰值),造成连续运输的材料磨损。凭借可调的弹簧力和无磨损运动,气动肌腱可吸收这些应力。通过压力可方便地调节弹簧力,易于使用,这使得气动肌腱脱颖而出。过程的变化需要改变机械弹簧和重量。气动肌腱可很好地替换采用负载和机械弹簧的现有解决方案。
5.7可调接触压力
气动肌腱尤其适用于辊轮印刷。使用工作压力,接触压力可发生变化。这种设计意味着,元件不能卡住,因此不会有峰值力。气动肌腱为气密封结构,所以可断开气源,仍能继续工作。
5.8刹车,用于张力调节
气动肌腱的弹簧特性让其特别适用于绕线时调节线的张力。因为线需要进行加工,所以线内部的张力始终很高。这就意味着,线的张力需要始终处于最佳水平,以保护线,减少所有部件的磨损。
6、结论
气动人工肌肉作为一种清洁安全、柔顺性好的仿生驱动器,为仿生机器人产业开辟了全新的发展空间,由其驱动的柔性机器人克服了传统刚性机器人在柔顺性方面的本质局限,未来会在航空航天、水下作业、抢险救灾、医疗康复、家用机器人等多个领域具有广阔的应用前景。然而,由于气动人工肌肉具有高度非线性、时变性、迟滞性、蠕变性等,为其驱动的仿生软体机器人的运动控制研究带来了巨大的挑战,虽然目前已取得了一些研究成果,但是依旧存在很多亟待解决的难题,为了使其日后更好地应用在人类生产生活中,本文多方位地考虑了多个应用场景下的控制难点,将该领域控制研究的发展方向大致归结为以下几个要点,未来该领域的控制研究可以从以下几个方面深入展开,助推该领域更好地发展:
1)高频运动下的稳定控制
由于气动人工肌肉固有的迟滞、蠕变等特性,高频运动使惯性和阻尼在动力学中发挥更大的作用,且易激发额外的高频动力学,破环系统稳定性,实现其在高频运动下的稳定控制是非常困难的。目前气动人工肌肉驱动的机器人大多采用较低的运动频率,然而在实际作业环境中,为了提高作业效率,机器人的运动频率不能过低,若始终保持低频运动则难以满足大多数作业要求。因此,实现气动人工肌肉驱动机器人在高频运动下的稳定控制是未来该领域的研究方向之一。
2)高阶扰动补偿的鲁棒控制
气动人工肌肉由其内部的高压缩气体驱动,导致其对环境中的噪声特别敏感,而在复杂恶劣的作业环境中,例如抢险救灾领域,不可避免地存在多种未知的外界扰动,并且扰动往往持续多变,严重破坏系统稳定性。然而,目前该领域提出的一些抗扰控制方法普遍假设扰动恒定,或者扰动变化率非常缓慢的情况,这类方法在复杂的作业环境中实际应用效果将大打折扣。在未来,观测和补偿高阶扰动及其导数,提高气动人工肌肉驱动机器人的鲁棒性和环境适应性是一个重点的研究方向。
3)考虑负载变化的迟滞补偿控制
考虑到气动人工肌肉固有的迟滞特性,该领域常用的一类控制方法是:先对其进行迟滞建模作为前馈补偿器,再结合反馈控制器实现控制任务。值得注意的是,当气动人工肌肉末端负载发生变化时,气动人工肌肉的气压位移迟滞特性将随之受到一定的影响。例如,在实际应用中,机器人会进行抓取运放的作业任务,末端负载实时发生变化,导致离线的迟滞模型难以准确地进行前馈补偿,从而大大降低系统的控制精度。目前该问题并没有得到有效地解决,未来对于一类基于前馈迟滞补偿的控制方法,解决负载变化时稳定准确的运动控制是一个重点的研究方向。
4)考虑力和刚度的柔顺控制
气动人工肌肉自身可提供十分巨大的输出力,例如一根标称长度60mm、内径20mm的气动人工肌肉足以提供1500N的拉力,考虑到人机交互的过程中,例如医疗康复领域,如果不对接触力加以精确控制,则会存在非常大的安全隐患。再如操纵机器人完成一些精密任务时,需要满足输出力合适且位置准确的双重需求,然而在该领域中,同时考虑力和刚度的控制研究还较少。因此,实现精准位置控制的同时,考虑机器人的力控制和刚度控制,并且与一些智能控制方法相结合,实现智能化程度更高的阻抗控制、力位混合控制以及位置刚度控制是该领域一个非常具有发展前景的研究方向。
5)考虑人机协同的共享控制
机器人在生产生活中完成各种作业任务往往离不开人的操控和监管,但目前一个操作员通常仅能操控一个机器人,对人力资源要求高,且作业效率受限。未来在一些大型的作业环境中,多台机器人共同作业的需求将越来越突出,例如救援救灾领域。然而气动人工肌肉驱动机器人的现有控制方法存在适用场景有限、控制指令单一等问题,为突破这些瓶颈,如何结合实时场景与先验信息,实现人与机器人、机器人与机器人之间的协同共享控制,打破人机一对一格局,也将会成为未来该领域的一个研究热点。
参考文献:
[1]Caldwell D G, Medrano-Cerda G A, Goodwin M. Control of pneumatic muscle actuators[J]. IEEE Control Systems Magazine, 1995, 15(1): 40-48.
[2]Reynolds D B, Repperger D W, Phillips C A, et al. Modeling the dynamic characteristics of pneumatic muscle[J]. Annals of biomedical engineering, 2003, 31: 310-317.
[3]Tsagarakis N, Caldwell D G. Improved modelling and assessment of pneumatic muscle actuators[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065). IEEE, 2000, 4: 3641-3646.
[4]Kelasidi E, Andrikopoulos G, Nikolakopoulos G, et al. A survey on pneumatic muscle actuators modeling[C]//2011 IEEE International Symposium on Industrial Electronics. IEEE, 2011: 1263-1269.
[5]Sárosi J, Biro I, Nemeth J, et al. Dynamic modeling of a pneumatic muscle actuator with two-direction motion[J]. Mechanism and Machine Theory, 2015, 85: 25-34.
[6]Davis S, Tsagarakis N, Canderle J, et al. Enhanced modelling and performance in braided pneumatic muscle actuators[J]. The International Journal of Robotics Research, 2003, 22(3-4): 213-227.
[7]Koeneman E J, Schultz R S, Wolf S L, et al. A pneumatic muscle hand therapy device[C]//The 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE, 2004, 1: 2711-2713.
[8]Lilly J H. Adaptive tracking for pneumatic muscle actuators in bicep and tricep configurations[J]. IEEE Transactions on Neural systems and rehabilitation engineering, 2003, 11(3): 333-339.
[9]Mat Dzahir M A, Yamamoto S. Recent trends in lower-limb robotic rehabilitation orthosis: Control scheme and strategy for pneumatic muscle actuated gait trainers[J]. Robotics, 2014, 3(2): 120-148.
[10]Doumit M, Fahim A, Munro M. Analytical modeling and experimental validation of the braided pneumatic muscle[J]. IEEE transactions on robotics, 2009, 25(6): 1282-1291.
作者简介:性别:女,出生年月:1995年10月,民族:汉,籍贯:山东东营,学历:硕士研究生。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号