中国电子科技集团公司第二十研究所 710126
摘要:本文主要介绍了北斗卫星导航系统(GNSS)组成、特点及应用,概述了北斗导航信号抗干扰算法,提出了改进后的抗干扰算法-空时频联合自适应抗干扰算法,推导出了具体算法及流程,对空时频联合自适应抗干扰算法进行了仿真计算验证,该抗干扰算法已在实际项目中验证其可靠性,具有很强的工程意义。
0 引文
北斗卫星导航系统为我国自主研制开发的全球卫星导航系统,可实现全方位定位、导航、授时等功能,在国家经济建设以及国防安全方面扮演着十分重要的角色。北斗导航接收机通常工作在复杂环境中,容易受到电磁干扰的影响,这会影响导航定位的正常运行。为此,
针对提高接收机抵抗电磁干扰,研究人员研制了卫星抗干扰设备为北斗导航设备的正常运行提供保障。因此,对于北斗抗干扰技术仍有很大的研究空间。
目前,常见的抗干扰算法有空域抗干扰算法、时域抗干扰算法、频域抗干扰算法、空时抗干扰算法、空频抗干扰算法、LMS自适应窄带陷波抗干扰算法等。国外已对导航抗干扰算法进行了大量的研究,例如文献给出了LMS变步长算法,文献针对共轭梯度抗干扰算法进行了分析与推导,给出了优化计算过程。国内西安电子科技大学的王营营改进了扩频技术的GPS抗干扰方法,国防科技大学鲁祖坤开展了天仙阵抗干扰关键技术研究等。现今对于抗干扰算法的改进优化以及仿真实现仍是行业热点。
本文针对北斗导航接收机设备提出了空时频联合抗干扰算法,给出了具体的推导过程及算法原理,实现了北斗三号卫星导航抗干扰平台系统,并在具体工程上进行了算法的实际验证与应用。
1 北斗卫星导航系统
目前,全球卫星导航系统(GNSS-Global Navigation Satellite System)主要包括了以下几种:美国的全球定位系统(GPS- Global Positioning System)、欧洲的伽利略卫星定位系统(GALILEO-Galileo Satellite Navigation System)、俄罗斯的全球导航卫星系统(GLONASS- Global Navigation Satellite System)以及我国的北斗导航卫星定位系统(Bei Dou Navigation Satellite System)等。北斗卫星导航系统是中国基于国家安全及经济发展需求下独立自主研制、设计开发的卫星导航系统,基于北斗有源及无源两种技术体制,实现导航、定位、授时、测速、全球短报文等功能。自20世纪80年代开始建设,主要分为了三期进行,至2020年6月发射了北斗系统第55颗卫星部署完成了北斗三号全球卫星导航系统。
2 抗干扰算法
实际应用环境中,卫星导航信号淹没在噪底以下,信号微弱,极易受到压制干扰的影响,而干扰的来向和干扰个数都是未知的,因此需要根据天线接收的信号,进行自适应调零。自适应调零是一个多通道的阵列信号处理过程,其既不同于时域处理也不同于频域处理,而是一个空域滤波过程。通过选取合适的自适应算法,就可以接收有用信号,抑制多个干扰,使得系统输出的信噪比最大,从而提高系统的检测性能。
2-3LMS自适应窄带陷波
基于自适应算法的复数陷波器单元级联结构应用于窄带抗干扰与卫导传输系统有很好的兼容性;其具体工作模式是由前级干扰检测模块通过在各频率分量上进行功率积分,当某一频率分量存在干扰信号时,其能量积分会超过设定的阈值,干扰检测模块输出干扰标志信号,陷波器的传输函数在该频率分量上形成一个零陷,则该频率分量上干扰信号和有用卫星信号同时被滤除,因此陷波器只在信号能量超过干扰门限处形成陷波;而由于卫星导航信号采用CDMA扩频调制方式,频域内较小范围的能量损失在解调过程中可以通过各频率分量上的相关关系解调出来,且不损失其中包含的数据信息。利用这一原理在数字中频域可实现对输入信号的抗干扰处理。
2-1空域抗干扰
空域抗干扰技术是通过多个自适应天线以特定组合方式排列形成天线阵,在干扰噪声信号的入射方向上形成零陷,最终达到抑制干扰的效果。与单纯的时域和频域抗干扰技术相比较,空域抗干扰技术可以有效的对宽带干扰进行抑制,而且实现比较简单。但是也有一些不可忽视的缺陷,当干扰信号的入射方向和有用信号的入射方向接近或相同时,在干扰信号方向形成零陷进行抗干扰的同时也会抑制有用信号,甚至不能正常的接收。
空域抗干扰技术可以根据对有用信号的信号量需求程度可分为:调零技术与波束合成技术。其具体实现流程图如下所示:

空域抗干扰算法实现流程框图
2-2空频抗干扰
空频抗干扰技术(SFAP,Space Frequency Adaptive Processing),起初是为了降低空时抗干扰技术的计算复杂度而提出的一种优化算法。SFAP算法通过FFT将阵列输入信号划分为若干频带并在每个频带上进行阵列处理。
STAP算法为了估计权值,必须对MN*MN维的矩阵进行求逆运算。而 SFAP由于频域权值在每个频点上独立计算,使得操作在M*M维矩阵中进行,从而降低了系统计算的复杂度。空频联合自适应调零(SFAP-NULL)技术实现流程图如下图所示。

空频抗干扰算法实现流程框图
2-4空时
空时抗干扰技术是将时域和空域抗干扰技术相结合,在每个天线阵元的后面部分添加多个时间延时单元,从而形成空时二维的处理结构,如下图:

空时抗干扰算法原理框图
从图中的横向上来看,阵列天线中的每个天线阵元的若干个时间延时单元组成了FIR时域滤波结构,在这个角度上来看,是在时间域上面对干扰进行抑制的。从纵向上来看,若干个天线阵元又组成了普通空域的滤波结构,在空域上面对干扰进行抑制处理。所以,空时抗干扰技术可以在空域和时域的二维域上进行干扰抑制。空时抗干扰技术克服了空域抗干扰技术的不足,在不增加天线阵元的前提下,大大增加了天线阵列的自由度,进而极大的提高了抗干扰能力。空时联合自适应调零技术(NULL-STAP)实现流程图如下图所示。

空时抗干扰算法实现流程框图
3改进的抗干扰算法—空时频抗干扰算法
结合空频算法和空时算法的优缺点,采用空时频算法进行抗干扰。算法原理见下图所示,输入信号下变频后,对信号进行子带分割,同一子带频率的M路子带信号,再进行空时算法抗干扰,抗干扰后数据再经内插合路上变频,还原为抗干扰后数字中频信号。

空时频抗干扰算法原理框图
子带空时抗干扰使用LCMV图准侧,约束主阵元天线完整通过,抗干扰输出功率最小,计算得到最佳权值,完成对干扰进行抑制。
算法原理如图所示,输入信号下变频后,对信号进行子带分割,同一子带频率的M路子带信号,再进行空时算法抗干扰,抗干扰后数据再经内插合路上变频,还原为抗干扰后数字中频信号。该方案避免使用大规模FFT,便于后续流片,通过滤波器进行子带分割的方式,降低了频谱泄露,同时降低了每个子带在抗干扰过程中所需的时域延时打拍数,降低了自相关矩阵维数,有效降低运算量,相比空时抗干扰算法更更节省硬件资源。空时频抗干扰算法相比空频抗干扰算法,可通过提高子带滤波器的阶数来增强带外抑制能力,而空频抗干扰算法则需要增加FFT点数并采用加窗的方法来增强带外抑制,因此在干扰特别强时,空时频抗干扰算法具有明显的优点。
4仿真计算验证
为了验证空时频联合自适应抗干扰算法,对空时频联合自适应调零算法抑制宽带干扰的性能进行仿真分析。针对空时频联合自适应抗干扰算法仿真分析,设置仿真条件如下:
抗宽带式干扰指标分析仿真条件
干扰信号中心频率 | B3A | 备注 |
干扰信号形式 | 宽带 | |
信噪比(SNR) | -33dB | |
单干扰信号强度 | 105dB(ISR) | 仰角45°,方位角180° |
三干扰信号强度 | 95dB(ISR) | 干扰1:仰角60°,方位角0° 干扰2:仰角45°,方位角120° 干扰3:仰角30°,方位角240° |
六干扰信号强度 | 85dB(ISR) | 干扰1:仰角10°,方位角0° 干扰2:仰角20°,方位角60° 干扰3:仰角5°,方位角120° 干扰4:仰角45°,方位角180° 干扰5:仰角15°,方位角240° 干扰6:仰角30°,方位角300° |
单干扰仿真结果如下:
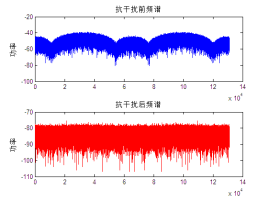
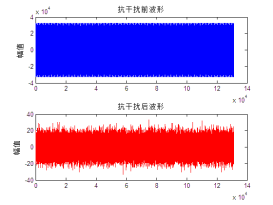
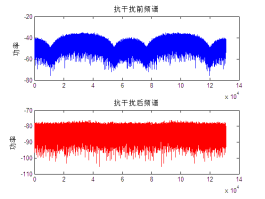
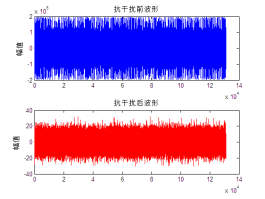
抗干扰前后时频域变化
单干扰105dB条件,使用空时频算法仿真结果看到,干扰被很好的抑制,与噪声大小一致。抗干扰后相关结果如下:
三干扰仿真:
下图所示为三宽带干扰95dB干信比条件下,抗干扰波束的空间响应。从图中可以看出,抗干扰波束分别在仰角60°、45°、30°,方位角0°、120°和240°的方向上形成了超过-75dB的零陷,可以有效地将从这些方向入射的干扰信号抑制到与系统噪声级相当的量级,经过接收机的解扩处理后可以保证接收机的捕获、跟踪等运算的有效性。
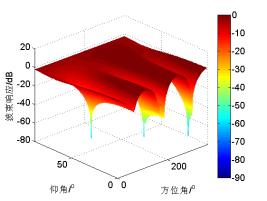
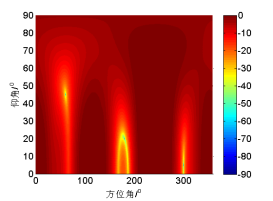
(a)三维视图 | (b)x-y视图 |
三宽带干扰的抗干扰波束的空间方向响应
从宽带抗干扰仿真可知,基于空时频LCMV自适应调零算法可以达到系统对抗三宽带压制式90dB干扰。
六干扰每个干扰信号强度为85dB,六干扰仿真:
抗干扰前后时频域变化
从图中可以看出,抗干扰处理在不同干扰方向上形成零陷,可以有效地将干扰信号抑制到系统噪声级之下。
4总结
本文阐述了北斗卫星导航系统的组成、应用等,主要介绍了抗干扰技术及相关算法,推导了空时频联合自适应抗干扰算法的算法原理及实现流程,并针对单干扰、三干扰、六干扰宽带干扰进行了基于空时频联合自适应抗干扰算法的仿真计算验证,仿真显示空时频具有良好的抗干扰性能,且已经在具体工程上验证了算法的可行性和可靠性,为后续进行北斗卫星导航抗干扰研究与应用提出了新的方法,具有很强的科研及工程意义。
参考文献:
[1]鲍志雄.我国高精度卫星导航产业发展与前景[J].卫星应用, 2020( 5) : 50-53.
[2]刘胤廷.卫星导航天线及自适应抗干扰技术[D]. 北京: 北京邮电大学, 2019.
[3]李成城.导航接收机自适应抗干扰算法研究与实现[D].西安: 西安电子科技大学, 2020.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号