(营口理工学院 机械与动力工程学院 辽宁营口 115014)
摘 要:电液伺服阀是典型的机电液一体化产品,其机械、液压、电磁等子系统的原理构成都很复杂。为避免采用多软件联合仿真易出现的接口复杂等问题,利用MATLAB软件的拓展模块Simscape在同一的平台上对伺服阀进行多领域建模仿真。以常见的力反馈式两级电液伺服阀为例,介绍其结构组成及工作原理,利用软件对各子系统建模,建立了开环液压控制系统,依据国外某标准产品设置参数,对其进行动态仿真,分析伺服阀各环节的动态特性。结果表明所建模型能较好的反映出伺服阀的动态特性,为伺服阀的优化设计提供了新思路。
关键词:电液伺服阀;多领域建模;喷嘴挡板;液动力
0引言
电液伺服阀作为电液伺服控制系统的核心元件,最为普遍的两级力反馈式电液伺服阀的组成包括力矩马达、前置级喷嘴挡板阀和功率级滑阀等,各子系统的原理构成很复杂。传统的机电液一体化系统仿真的接口技术复杂,多个程序同时占用计算机资源,且必须保证各仿真程序同步并行运行,其仿真过程复杂耗时,且易出现仿真软件的兼容性问题[1]。
运用Simscape软件,针对其结构原理,在统一平台上建立子系统模型,并构建简单伺服阀开环控制系统,依据国外标准伺服阀的参数来设置模型进行仿真。
1工作原理
两级力反馈式电液伺服阀的前置级液压放大器是由永磁动铁式力矩马达控制的双喷嘴挡板阀,功率级液压放大器为三位四通滑阀,利用反馈杆将阀芯与衔铁挡板组件连接,组成滑阀位移力反馈回路,结构原理如图1所示。
在没有控制电流输入的情况下,弹簧管将衔铁托起在两块导磁体之间,挡板位于两个喷嘴之间,由于发奎干小球的约束条件下使滑阀的阀芯停在中间位置,此时,伺服阀不存在液压输出[2];当控制电流为差动控制电流Δi=i1-i2输入的情况下,使得衔铁上能够产生与顺时针方向相反的电磁力矩,进而驱动衔铁挡板组件以弹簧管转动中心为基准向逆时针方向偏转,迫使弹簧管以及反馈杆发生形变,使得挡板位置发生变化,进而使得喷嘴挡板阀的间隙由两侧相等变为右小左大,最终导致滑阀腔右侧压力p2p升高,左侧压力p1p降低,使得推动滑阀阀芯向左侧运动,进而推着反馈杆上的小球向做侧滚动,加剧反馈杆的形变。直到此形变所产生的反力矩和电磁力矩相等的情况,使得衔铁挡板重新达到平衡[3]。
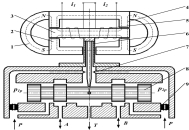
图1 力反馈两级电液伺服阀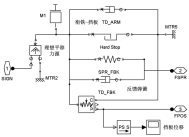
图2 力矩马达/衔铁子系统模型
2建模过程
根据两级力反馈式伺服阀的结构原理,仿真模型分为力矩马达/衔铁组件、喷嘴/挡板模块和滑阀三部分,分别用三个子系统表示[4]。
2.1 力矩马达/衔铁模型
力矩马达/衔铁组件的子模型如图2所示。其结构原理复杂,电磁特性参数难获取,本文将其进行等效简化处理,用理想力源元件代替,产生与输入信号成比例的作用力。
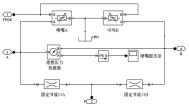
图3 喷嘴/挡板子系统模型
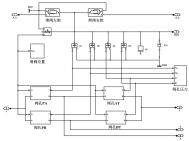
图4 伺服阀滑阀系统模型
2.2 喷嘴/挡板模型
喷嘴挡板放大器的液压模型如图3,用可变节流孔模块模拟喷嘴原理,不仅可以方便地根据伺服阀产品手册提供的喷嘴阀开口量和流通面积等结构参数或压力-流量特性曲线进行参数设置,还充分考虑了油液的流动状态变化和阀的泄漏等因素。
2.3 主阀模型
主阀子系统模型如图4所示,用作用在主阀芯的伺服执行机构和滑阀的四个变量节流孔表示。伺服执行机构用平移液压机械转化器模块来模拟,它是理想转换器,能将液压能转换成平移运动形式的机械能,用来模拟左右喷嘴腔对主阀芯的作用。
此外,作用在滑阀的载荷还有:四个变量节流孔的
轴向液动力PA、PB、AT、BT,粘性摩擦力TD1,惯性力M1。其中阀孔的轴向液动力的大小由与槽孔面积可变节流孔模块串联的阀孔液动力模块决定。槽孔面积可变节流孔模块用来模拟圆柱形阀芯锋利边缘与阀套上的方槽形成的可变节流孔,流经的流量成比例于孔的开口量和进出口的压力差,阀孔液动力模块是专门用来模拟油液流经阀孔时产生的稳态轴向液动力。

图5整体仿真模型
2.4 整体模型
在完成以上三个子系统的模型并验证后,建立两级电液伺服阀的完整模型,设计一个简单的开环液压控制系统,用伺服阀控制一个带模拟负载的双作用液压缸,如图5所示。
仿真参数根据国外某一标准两级力反馈式电液伺服阀的实际参数而确定。仿真主要参数如表1所示。
表1 伺服阀主要仿真参数

3仿真结果分析
设置正弦控制信号输入频率为10 r/s,仿真时间为1.5 s。图6~8分别为伺服阀挡板位移、喷嘴腔压力差和滑阀位移曲线。
根据图6、7呈现的位移曲线以及压力差曲线,在控制信号首次达到最大值时,因时间短,滑阀未能够对控制信号做出及时响应,使挡板产生的位移量小,导致左右两侧压力变化小;当其在压力变化作用下使运动达稳定时,挡板做周期性运动,极限位置受Hard stop模块限制,防止挡板碰触到喷嘴发生磨损或塑性变形,符合伺服阀的设计要求。


图6 挡板位移曲线
图7 喷嘴腔压力差曲线

图8伺服阀滑阀位移曲线
根据图8的位移曲线可知,阀芯的位移呈现余弦趋势,说明阀芯能够对控制曲线进行较好的响应,也就是说挡板在出现偏转的情况下,阀芯在左右两侧的压力推动下能反向推移,同时反馈杆能够把滑阀的位移量及时的反馈回来,进而迫使挡板归位,最终完成伺服控制过程。
4结论
利用Simscape软件建立了两级力反馈式电液伺服阀的仿真模型,对伺服阀控制的简单开环液压系统进行了仿真,并分析伺服阀各结构的动态特性曲线。仿真结果表明:采用基于Simscape软件的多领域物理系统的建模方法,实现了在统一构建下的不同领域的建模,所建模型直观地表现出两级电液伺服阀的物理系统的组成结构模型,能较好的反映出两级电液伺服阀的动态性能,为电液伺服阀的建模仿真和优化设计提供了新思路。
参考文献
[1]李如平. 射流管式水压电液伺服阀研制及特性研究[D].华中科技大学,2011.
[2]安文龙. 直动式电液伺服阀动态特性研究[D].长安大学,2016.
[3]陈良华. 双喷嘴挡板伺服阀动态参数寻优及仿真研究[D].武汉科技大学,2015.
[4]王慧,张晓曼,宋宇宁. MATLAB求解电液伺服阀的流量特性曲线[J]. 电子测量与仪器学报,2015,29(08):1236-1244.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



