山东交通学院 汽车工程学院,山东 济南 250357
摘要:动力性和制动性是评价车辆性能的关键指标,在对关键部件进行定参数、零部件选型、匹配优化时需要进行大量计算,现在企业多采用EXCEL进行计算,导致效率低下、直观性不强。本文基于MATLAB软件的App Designer模块,开发了车辆动力性和制动性仿真分析软件,具有良好的人机界面和曲线输出功能,并以某型号汽车的实际参数进行了动力性和制动性仿真验证,证明了软件仿真分析的可行性,能够为汽车设计提供良好的支撑,提高设计效率。
关键词:汽车;MATLAB;仿真分析;App Designer
中图分类号:U462.3 文献标志码:A
0 引言
近年来国内外汽车行业发展迅猛,截至2021年7月,全国家用车保有量达3.84亿辆。我国正由汽车制造大国往汽车制造强国过渡,汽车的正向研发技术越来越受到各汽车设计单位的重视。车辆的动力性和制动性是评价车辆性能的关键指标之一[1],其性能的好坏影响到车辆的品质和市场。
如今国内外对App Designer在各领域的应用进行了研究[2],韦超毅[3]等采用App Designer对汽车的爬坡能力进行建模与仿真,开发设计了一款软件,测试了试验车的爬坡性能;张晓荣[4]等针对调节阀工作流量特性的畸变问题,设计了工作流量校正算法,并采用App Designer开发了操作简单、功能完整的操作界面;李晶[5]等基于MATLAB对实际汽车进行动力性仿真,假设节气门开度处于最大情况下,通过仿真分析绘制出该工况下车辆动力性曲线并分析结合实际实验测量数据,验证了该仿真系统的准确性; 陈利娜[6]使用MATLAB对汽车制动性能分析,获得了车辆制动力分配曲线,为汽车制动性仿真分析提供了准确的操作方法与可视化数据。
目前针对汽车性能的理论研究非常成熟,但多数只是将汽车部分性能通过MATLAB分析,如果改变整车参数后还需要繁琐的源代码修改,实用性不强。本次通过建立车辆动力性和制动性的动力学模型,利用MATLAB 的App Designer模块开发了仿真分析软件,具有良好的人机界面,操作简单、实用性强,为车辆零部件的参数确定、选型、整车性能分析提供高效的分析工具。1
1 车辆动力学模型
1.1 车辆动力性模型
根据《汽车理论》描述,发动机产生的转矩Ttq经过各级传动系统传至驱动轮产生车辆所需的驱动力
 , 1\* MERGEFORMAT ()
, 1\* MERGEFORMAT ()
式中, 为传动系统的机械效率;Ttq为发动机转矩,N·m;
为传动系统的机械效率;Ttq为发动机转矩,N·m; 为传动系统总传动比;R为车轮半径,m。
为传动系统总传动比;R为车轮半径,m。
根据发动机台架试验会得到的转矩Ttq与转速n离散数据点,这些离散点可以用公式(2)的多项式来拟合,拟合方程式为
 , 2\* MERGEFORMAT ()
, 2\* MERGEFORMAT ()
式中,a0、a1至ak为拟合系数,一般根据最小二乘法求得[9],在MATLAB中通过曲线拟合工具箱(cftool)可以求得,本文选择四次多项式对转矩与转速进行拟合;n为发动机转速,r/min。
车辆行驶时会受到各种阻力,分析计算时一般只考虑加速阻力、空气阻力、坡度阻力、滚动阻力[10]。根据汽车驱动力与所受阻力关系可得出车辆行驶方程[11],有
 , 3\* MERGEFORMAT ()
, 3\* MERGEFORMAT ()
 。 4\* MERGEFORMAT ()
。 4\* MERGEFORMAT ()
式中,Fw为空气阻力,N;Fi为坡道阻力,N;Ff为滚动阻力,N;Fj为加速阻力,N; A为汽车迎风面积,m2;CD为空气阻力系数; 为坡度角;f为滚动阻力系数;δ为汽车旋转质量换算系数。
为坡度角;f为滚动阻力系数;δ为汽车旋转质量换算系数。
1.2 车辆制动性模型
车辆前、后轮所受作用力Fz1、Fz2[13],有
 , 5\* MERGEFORMAT ()
, 5\* MERGEFORMAT ()
式中,G为汽车重力,N;z=aj/g为制动强度。
理想的制动器制动力关系曲线,称为I曲线,有
 , 6\* MERGEFORMAT ()
, 6\* MERGEFORMAT ()
式中,Fb1、Fb2分别为前、后制动器制动力,N。
在实际道路下这种理想状态不会达到,在汽车制动器设计时,通常会提前匹配好前、后轮制动器制动力之间关系[14],有
 , 7\* MERGEFORMAT ()
, 7\* MERGEFORMAT ()
式中,β为制动器制动力分配系数。
根据公式(7)可以绘制实际前、后制动器制动力的关系曲线,称为β线。
同步附着系数μ0为β线与I线交点对应的地面附着系数μ,有
 , 8\* MERGEFORMAT ()
, 8\* MERGEFORMAT ()
前、后轴的制动效率 为
为
 , 9\* MERGEFORMAT ()
, 9\* MERGEFORMAT ()
式中,μi为利用附着系数。
汽车在μ<
μ0情况下汽车制动总距离[15]为
 。 10\* MERGEFORMAT ()
。 10\* MERGEFORMAT ()
式中,u0为车辆制动初速度,t1为驾驶员开始踩刹车到摩擦片完全贴合制动盘的时间,本文假设为0.1s,t2为前、后轮都抱死起始时刻,t'2为前轮抱死,后轮边滚边滑的起始时刻。
2 仿真分析
2.1 整车仿真分析参数
整车参数依据某型号汽车的整车参数选取,如表1所示。
表1 某型号汽车动力性仿真参数
参数名称 | 数值 | 符号/单位 | 参数名称 | 数值 |
汽车总质量 | 1200 | m/kg | 主减速器传动比 | 4.3 |
空气阻力系数 | 0.3 | | 一档减速器传动比 | 3.5 |
滚动阻力系数 | 0.012 | | 二档减速器传动比 | 2.058 |
迎风正面面积 | 1.75 | S/m2 | 三档减速器传动比 | 1.35 |
滚动半径 | 0.28 | r/m | 四档减速器传动比 | 1 |
传动效率 | 0.9 | | 五档减速器传动比 | 0.764 |
表2 某型号汽车发动机试验数据
转速/(r/min) | 1000 | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 | 4500 | 5000 |
转矩/(Nm) | 78 | 84 | 86 | 88 | 90 | 87.5 | 84 | 82 | 80 |
表3 某型号汽车制动性仿真参数
载荷 | 汽车质量/kg | 汽车质心距地面高度/m | 轴距/m | 质心至前轴距离/m | 质心至后轴距离/m | 制动器制动力分配系数 | |
空载 | 900 | 0.512 | 2.65 | 1.3 | 1.35 | 0.58 | |
满载 | 1200 | 0.576 | 2.65 | 1.6 | 1.05 | 0.58 | |
表4 某型号汽车制动性仿真所需路面附着系数参数
干燥路面 | 潮湿路面 | 下雨开始时路面 |
0.7 | 0.5 | 0.3 |
2.2 仿真分析结果
本文通过App Designer设计的车辆动力性和制动性仿真分析软件开发界面,如图1和图2所示。
| |
图1 汽车动力性分析部分 | 图2 汽车制动性分析部分 |
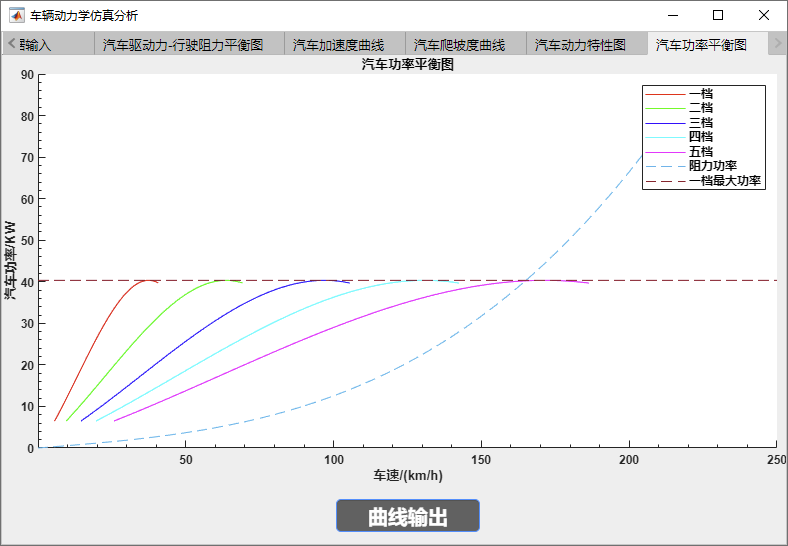
图3为汽车动力性仿真曲线,反映了各档位可以提供的驱动力、爬坡度、动力因数、功率等,当行驶阻力与汽车最高档可输出驱动力相交处对应的车速为汽车的最大可输出速度,可知该型号汽车最大输出速度为166.8km/h,且在一档时有最好的爬坡度,约为0.36rad(20.6°)。根据《汽车爬陡坡试验方法》GB/T12539-1990[20]可知对于普通家用汽车,最大爬坡度应在10°左右,所以该型号汽车符合国标。根据汽车功率平衡图,可以看出各档可输出的最大挡位基本一致为40.5kw,挡位越高其可输出的速度范围也越大,在相同车速下,挡位越低后备功率越高。
| |
a)汽车驱动力-行驶阻力平衡图 | b)汽车加速度曲线 |
| |
c)汽车爬坡度曲线 | d)汽车动力特性图 |
| |
e)汽车功率平衡图 | |
图3 汽车动力性仿真曲线
图4为汽车制动性仿真曲线,在图中可以看出满载时I曲线与β曲线的交点处,前、后制动器制动力分别为5800N、4200N,根据公式(8)计算同步附着系数为0.845,根据c图可知在满载时,路面附着系数为0.845下汽车的制动效率可以达到100%。当车辆以50km/h初速度制动时,在干燥路面的总制动距离为17.14m,在潮湿路面的总制动距离为22.09m,在下雨开始时路面的总制动距离为33.86m,路面附着系数越低,在相同初速度情况下总制动距离就越远。
| |
a)汽车制动力分配曲线 | b)利用附着系数与制动强度曲线 |
| |
c)制动效率与附着系数曲线 | d)汽车制动距离与附着系数的关系曲线 |
| |
e)汽车制动距离与制动初速度的关系曲线 | |
图4 汽车制动性仿真曲线
3 结论
1)本文根据汽车理论相关知识,利用MATLAB App Designer开发了车辆动力学和制动性分析软件,具有良好的人机界面,并对某型号汽车的汽车动力性与制动性进行了分析仿真,得到了汽车动力性与制动性能特性曲线,证明了该款软件的有效性,提高了工作效率。
2)本文通过对车辆工程仿真软件的验证,证明了该款软件的准确性与实用性,通过将汽车两种性能分析集成在一款软件中,也体现了该方法的可拓展性,在后续软件开发中会将汽车设计仿真中其他所需要的模块一同集成在该款软件中,进一步完善软件功能。
参考文献:
[1]任肖红.基于MATLAB四轮转向汽车操纵动力学及控制策略研究[D].太原理工大学,2018.
[2]张西晨.基于MATLAB App Designer电容漏插检测系统[J].软件工程与应用,2021,10(4):441-453.
[3]韦超毅,许哲,李韬,等.基于MATLAB App Designer的汽车爬坡能力建模与仿真[J].机械工程与技术,2020,9(6):594-601.
[4]张晓荣,徐善智,乔凌霄,等.基于App Designer的调节阀流量特性校正系统设计[J].自动化与仪表,2021,36(12):80-84.
[5]李晶,郑路.基于MATLAB的汽车动力性仿真研究[J].中州大学学报,2017,34(4):121-124.
[6]陈利娜.基于MATLAB的汽车制动性能分析研究[J].农业装备与车辆工程,2013,51(11):71-74.
1基金项目:山东交通学院研究生科技创新基金资助项目(2021YK06)
山东交通学院博士启动基金项目(BS201902007)
山东交通学院本科教学改革项目(2021SJYB06)
第一作者简介:邹彦冉(1998—),男,山东德州人,硕士研究生,主要研究方向为汽车运行安全与节能环保,E-mail:1797068087@qq.com。
*通信作者简介:张竹林(1979—)男,山东青岛人,副教授,工学博士,主要研究方向为汽车CAE分析与专用车辆,E-mail:qcxzhang@126.com

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号