广西钦州市北部湾大学
摘要:可调尾翼系统(简称“DRS”)是一项通过改变赛车尾翼攻角,从而降低赛车直线行驶所受空气阻力的技术。本文设计一种可调尾翼系统,主要内容为针对直线和过弯这两种工况对方程式赛车进行的整车分析,得出赛车尾翼在过弯和直线时的尾翼攻角配合。在尾翼上安装连杆机构,并使用单片机控制舵机,舵机驱动连杆机构的方式,改变尾翼攻角,提高赛车过弯稳定性和直线极速的能力。
关键词:整车分析;尾翼;单片机;舵机;
空气动力学套件模型
方程式赛车空气动力学套件主要的作用是在赛车行驶时,产生下压力,保证赛车在行驶时的稳定性,其部件包括前翼、尾翼、扩散器和侧翼。
对于翼片的设计主要是利用profili生成一定厚度和曲面的翼型翼片。在比赛中,方程式赛车大多数情况是在低速下行驶,所以选择使用低速高升力的翼型,并且采用组合翼的形式。本文设计的前翼为二段翼,它的设计重点是引导气流外形,加速水箱的散热。扩散器与前翼配合在气流流经前翼后梳理气流,同时,在扩散器上设计保压槽和泄压孔。尾翼和侧翼均采用三段翼的形式。侧翼在产生下压力的同时还有引导气流外洗,减少气流与后轮接触的面积,从而降低产生的阻力。尾翼在产生下压力的同时,还通过梳理头枕、进气管后面的气流,起到保压减阻的作用。如图1.1为方程式赛车的空气动力学模型。对于分析时所用的计算域设计,它的长为车长的10倍,宽为6倍,高为5倍。
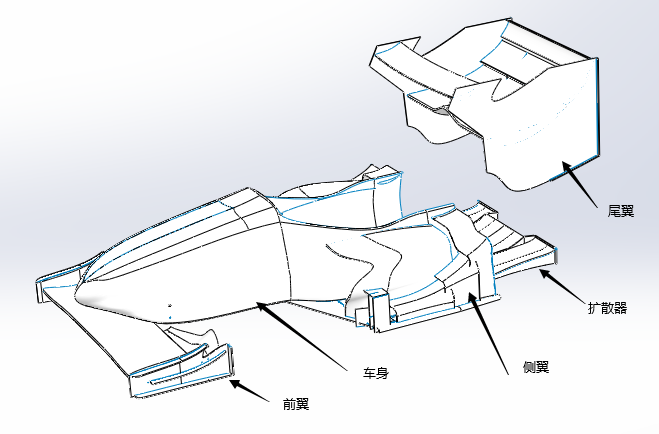
图 1.1 空气动力学模型
方程式赛车整车分析
2.1网格划分
网格划分分为面网格和体网格两部分,在面网格划分中,使用hypermesh软件对面网格大小,类型进行设置,选用的网格为六面体网格。对于网格的大小,计算域划分的网格为稀网格,空气动力学套件、车身等使用密网格,在整车的附近设置一个加密区,用于加密网格,提高计算分析的精度。由于分析的模型以及计算域在结构上具有对称性,所以在划分网格时可以只对一半的模型以及计算域划分网格,从而减少了运算分析的时间[1]。体网格划分则运用ICEM-CFD软件,它具有强大的六面体网格划分功能和强大的模型修复能力,划分的网格类型为非结构网格,有利于对赛车复杂的曲面划分网格。为了提高计算的准确性和收敛性,生成网格质量应在0.3以上,模型最终网格总数在1500万左右。
2.2边界条件设置
方程式赛车整车的分析包括对赛车车身、轮胎、空气动力学套件进行分析。对方程式赛车进行空气动力学分析时,赛车周围的空气流动认为是定常不可压缩气流,求解过程中湍流模型采用 Standard模型,设置2阶迎风格式[2]。分析时,设置的边界条件包括三个部分。入口:设置为速度入口,速度为22m/s;出口:设置为压力出口;车轮车身、空气动力学套件和计算域四周:设置为无滑移壁面。
Standard模型,设置2阶迎风格式[2]。分析时,设置的边界条件包括三个部分。入口:设置为速度入口,速度为22m/s;出口:设置为压力出口;车轮车身、空气动力学套件和计算域四周:设置为无滑移壁面。
2.3尾翼的攻角组合
本文主要是分析方程式赛车在转弯和直线时的工况,过弯时,为了保证车辆的稳定性,所以需要比较大的下压了,而直线行驶时则是将重点放在减少产生的阻力上,以便于提高赛车的极速能力。如图2.1为整车的压力云图,2.2为湍流能量图。
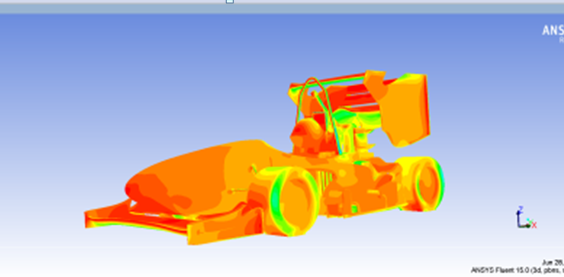
图 2.1 整车压力云图
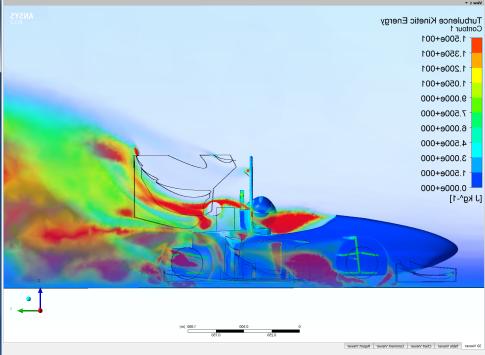
图 2.1 整车湍流能量图
通过整车的空气动力学分析,得出尾翼在直线和过弯时的攻角组合。赛车过弯时,尾翼主翼攻角为10°,第一襟翼为40°,第二襟翼为55°,直线行驶时,尾翼主翼攻角为10°,第一襟翼为0°,第二襟翼为0°。表2.1为赛车过弯时的仿真数据,表2.2为直线行驶时赛车的仿真数据。
表 2.1 赛车过弯时的仿真数据
| 车身 | 前翼 | 尾翼 | 扩散器 | 侧翼 | 前轮 | 后轮 | 整车 |
阻力 | 106N | 26N | 181N | 24N | 25N | 11N | 9N | 415N |
升力 | 85N | -320N | -493N | -209N | -70N | 42N | 37N | -913N |
表 2.2 赛车直线时的仿真数据
| 车身 | 前翼 | 尾翼 | 扩散器 | 侧翼 | 前轮 | 后轮 | 整车 |
阻力 | 106N | 26N | 115N | 20N | 25N | 11N | 7N | 337N |
升力 | 85N | -320N | -327N | -205N | -70N | 42N | 35N | -703N |
通过整车的分析,直线行驶较过弯时整车的阻力和下压力分别下降了18.7%和23%,有效地减少了直线行驶时的阻力。如图2.3为整车的渲染图

图 2.3 整车渲染图
3.连杆结构的设计
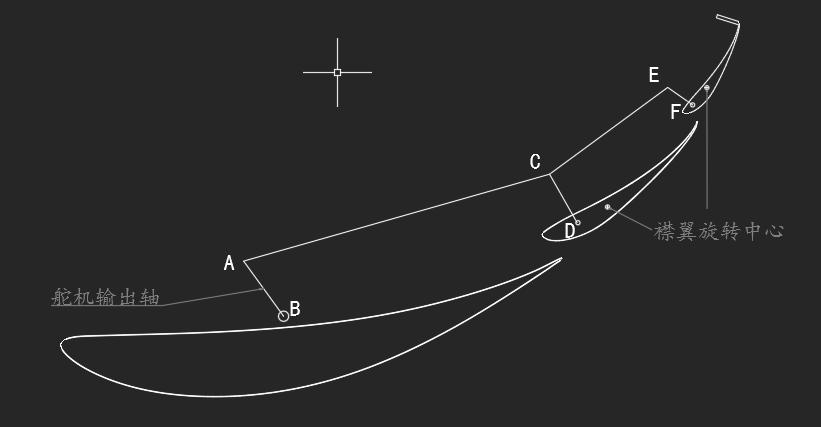
尾翼采用三段翼的形式,需要变换角度为尾翼中的两片襟翼.而襟翼攻角变换的关键在于通过机构使襟翼绕固定的旋转中心旋转,使襟翼完成固定的角度变换[3]。为了减少机构尺寸,以及考虑安装位置的方便,确定襟翼旋转中心之后。利用SOLIDWORKS草图对连杆机构进行运动校核,避免出现死点位置,设置了如图3所示的两组连杆机构,各杆的尺寸分别为:AB=60mm,AC=313mm,CD=55mm,CE=145mm,EF=30mm
图 2 连杆机构
4.可调尾翼的控制
4.1舵机选取
选用舵机驱动连杆装置,舵机是一种可以改变位置或角度的驱动器。它的内部包含有电子控制板,变速齿轮组,可调电位器,小型直流马达。舵机工作时,PWM信号进入信号调制芯片,通过舵机内部的电路,产生一个具有确定周期和宽度的电信号,此时直流电压与电位器的电压进行比较,从而得到一个输出的电压差[2]。电机的正反转由电压差的正负决定。当输出的电压差为0时,舵机停止转动。舵机内部的结构如图4所示
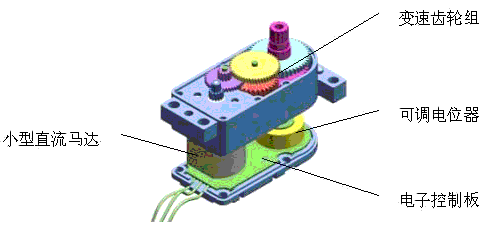
图 4.1舵机机械结构
舵机转角主要由输入脉冲宽度和周期决定,比较常见的周期为20ms,在此周期下,输入信号脉冲宽度与舵机输出轴的转角关系如图4.2所示。
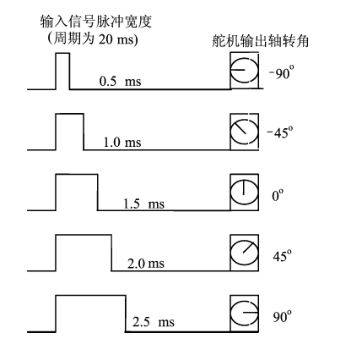
图 4.2舵机转角与输出脉冲宽度的关系
对于舵机的选取,根据各个车队可调尾翼系统设计的经验,本文选用DS3225舵机,它的输出扭矩为21kg-cm,足够驱动机械连杆装置。该舵机具有一定的防水功能,避免赛车在雨天进行比赛或跑动的时候可调尾翼系统受到损坏。
4.2单片机程序设计
单片机是指在一块半导体芯片中集成有中央处理器,存储器基本I/O接口以及定时、计数器等必要部件的完整的微型计算机。它具有可靠性高、体积小、功耗低、控制功能强等特点。单片机上有许多引脚,具有不同的功能,左端为输入端,右端为输出端。如图4.3为单片机的引脚结构图。
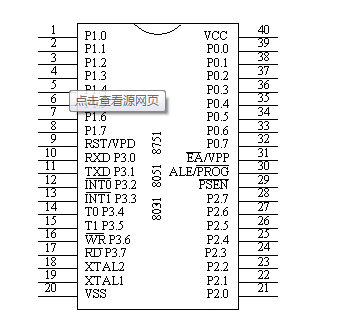 图 4.3 单片机引脚结构图
图 4.3 单片机引脚结构图
对于舵机的控制,本文设置的控制主程序包括三部分,如图4.4所示。设置了三个按钮,按钮1用于程序初始化,使舵机恢复初始位置;按钮2使舵机启动,开启DRS;按钮3用于关闭DRS。
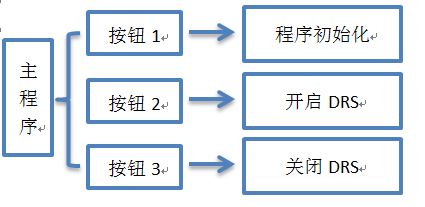
图 4.4 控制程序功能
本文控制单元采用STC89C51贴片式单片机,采用车载12V车载电源供电。为了驾驶员操作的方便,可调尾翼系统的开启和关闭按钮使用简单按钮,布置在赛车的方向盘上。当赛车进入弯道,防止侧滑,开启DRS,在直线赛道,关闭DRS,减少空气阻力,提高赛车的速度。
5.结论
本文对大学生方程式赛车的整车进行了分析,研究在直线和过弯工况时不同尾翼攻角的空气动力效应,得到了尾翼在直线和过弯时的攻角配合,同时为了实现襟翼攻角的变换,设计了机械连杆机构作为驱动机构。运用单片机编写控制程序,并且设置相应的按钮,驾驶员通过开启或关闭按钮,使赛车在过弯和直线都具有合适的尾翼攻角,提升了赛车的操控性和极速能力,成功达到设计目的。
参考文献
[1]毛旭,吴宁宁.FSAE赛车新型定风翼型气动性能的提升[J].机械科学与技术,2014,33(09):1397-1402.
[2]俞凯南,谢世滨.基于CFD的FSAE赛车尾翼设计及优化研究[J].机电工程,2018,35(01):16-21.
[3]邓召文,高伟,吴超,李鹏,陈美兵.FSAE赛车可调尾翼控制系统样机开发[J].合肥工业大学学报(自然科学版),2016,39(04):445-450.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



