安徽江淮汽车集团股份有限公司 技术中心乘研院 安徽合肥 230601
摘 要:汽车在当前时代背景下,已经成为人们出行中不可或缺的交通工具,人们在经济水平不断提高的同时,对于汽车的舒适度要求也不断提高,而汽车转向系统低频共振会使得汽车的整体舒适度下降。对此,有必要针对汽车转向系统低频共振进行分析。
关键词:汽车;转向系统;低频共振;分析
引 言:
汽车用户对于汽车的性能指标要求中,对于EPS的性能敏感度要求往往是最高的,主要是其优劣会对产品在市场环境中的竞争力直接产生影响。在具体实施整车EPS性能开发的过程中,通常都会将转向系统振动作为一个重要的考量因素。实际上导致转向系统低频振动现象出现的一个主要原因就是发动机怠速激励,而转向系统产生的振动问题,能够被驾驶员直接进行感知,在极大程度上使得车辆的驾驶舒适性产生影响。因此,对于汽车生产领域而言,转向系统设计的科学合理性是极为关键的。
汽车转向系统低频共振的问题分析
转向系统低频共振现象的产生,主要是由于车辆处于怠速状态时,其转向系统当中的频率与发动机产生了怠速激励使得频率发生了耦合而导致的。汽车发动机处于怠速工况下产生的激励,主要会产生往复惯性力,其频率的产生通常与车辆搭载发动机自身的转速及气缸数之间存在关系。一般情况下,乘用车型的发动机怠速转速处于700 r/min~1000 r/min之间,4缸机的激励频率基本上处于23Hz~33Hz之间、6 缸机激励频率基本上处于35Hz~50Hz之间。当汽车处于怠速工况的时候,驾驶员对于转向盘产生的振动强度感受是最为敏感的,通常情况下汽车未经过相关的优化,那么将会使得整车的状态出现转化,不断朝向系统1阶模态转化,这个时候非常容易与4缸发动机的怠速激励频率产生耦合,从而使得转向盘出现低频共振的状况。例如,某辆车的车型空调处于关闭状态下其怠速转速设定为750r/min、其空调处于开启状态下怠速转速设定为850 r/min,其怠速发动机2阶的激励频率检测结果分别为25 Hz与28Hz。该试验样车处于怠速工况下,其转向盘振动试验结果显示,转向盘试验检测方向X为0.39m/s2,试验检测方向为Y为0.34m/s2,试验检测方向Z为0.59m/s2。当此车转向盘处于三向加速度状态下,在28 Hz左右的时候均会产生振动的最大值,当三向加速度值X向处于0.39 m/s²时,其能量和能达到0.59 m/s²,这在主客观评价中均不能够被接受。为了能够更加有效地寻求出转向系统产生共振的主要因素,进而针对转向系统模型展开全面的分析与计算。针对原始转向模型当中所对应的单体及TB级模态频率展开分析,当模态振型TB为横向时其原始模型转向系统为28.4Hz,垂向时其原始模型转向系统为32.1Hz,其目标要求均大于等于38Hz;模型振型为转向管柱单体时,其横向原始模型转向系统为45.5Hz,其垂向原始模型转向系统为50.0Hz,其目标要求均大于等于50Hz。由此可见,该车辆的TB级模态与转向管柱单体模态都不能使目标要求得到满足。针对试验车型低速共振方面的问题,还有后续新车型具体实施开发的过程中所遇到的转向盘共振问题方面,在对转向系统振动问题实际开展研究的时候,主要对CAE分析方法、试验模态分析方法进行了充分的应用。⑴转向系统在结构方面的优化:可通过CAE模型的方式展开分析,进而获得转向盘理论当中的固有频率以及振型,进而来对系统当中的刚度特性进行了解;⑵针对转向系统展开相应的工程改进设计,并且通过CAE进行可行性分析,然后针对改进之后的转向系统展开相应的试验验证以及主观评价工作。汽车的转向系统通常是由多个子系统组合而成的,其整体部分的刚度主要是由转向柱、安装支架以及仪表板横梁来具体确定的。由于同一种类型的转向柱能够在不同车型之中都适用,所以有必要针对将转向系统在刚度与模态因素两方面的设计之初予以完善性的考虑,最终形成其相应的设计准则,在实施转向系统设计开发中起到知道作用。
2.汽车转向系统低频共振优化措施
2.1汽车电动助力转向系统的共振优化措施
EPS系统拥有多输入、输出的功能,能够对很多汽车的行驶信息进行收集,并且与之相关的汽车也需要具备多输出的能力,并且通过电动助力转向系统的有效利用下,汽车需要能够迅速的做出响应,比如驾驶员输入的转矩、制动、加速等信息,并能够实时的将汽车运行的相关行驶信息都反馈给驾驶人员,使其对汽车的各种路况、工作环境等方面进行了解。
2.2汽车转向系统的仿真模型构建
基于Simulink下建立起来的电动助力转向系统,其内部的每一个子系统模型构建完成之后,需要实施相应的联立,进而得到相应EPS控制的相关策略模型图,如下图所示。
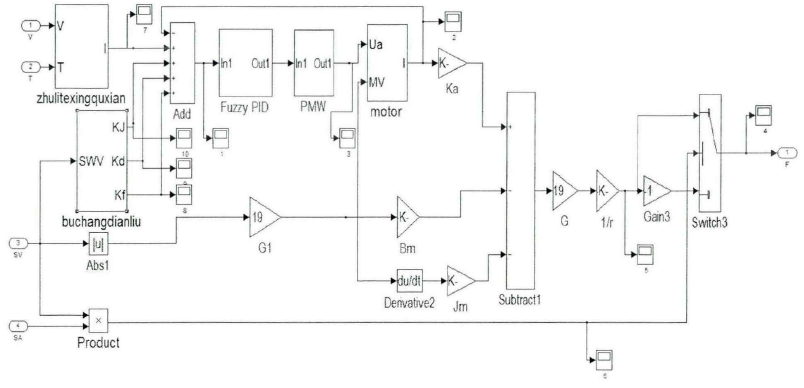
EPS控制策略框图
在对汽车模型进行利用,开展仿真行驶过程的时候,可以通过相应的系统中所自带的一些速度、转向盘传感器,来对汽车仿真过程当中具体行驶的速度以及转向盘力矩、转向盘转角、转速等方面进行检测;然后再将汽车行驶中的全部信息以电信号形式,将其传输到电动助力转向系统内部当中的电子控制单元中;最后将他们进行相应的做和,将最终的目标助力电流进行求解;在下层控制策略之中,需要将助力电机内部的助力电流、上层控制策略进行确定,并将其相关目标的助力电流实现做差,进而求出其中存在的误差、误差的变化率,并通过自适应F-PID复合控制器的利用下,来对电枢电流实施有效调节,最后输出适用于汽车模型而且能够实现对汽车准确有效控制的所需控制力矩。
结束语:
总而言之,汽车工程师在实际开展设计的时候,大多都凭借自身的经验来具体实施,在优化设计与分析的方法方面缺乏成熟性与可靠性。需要与相应的试验车型相结合,来针对转向系统的NVH特性实施开发,将转向系统作为模拟优化的研究对象,能够切实实现汽车怠速工况下转向盘振动的减小。此外,通过对有限元模型来对模态进行分析、优化以及实车试验等环节,能够形成一套相应的设计指导准则,这对于汽车车型实现开发而言是具有较高应用价值的。
参考文献:
张海娟,李卓,张春林,张亮.汽车转向系统低频共振研究[J].北京汽车,2019(03):13-16.
卢培纪,王福明.车辆转向系统振动特性的试验分析[J].中北大学机电工程学院,2014(01):119.
邵慧.基于底盘激励的汽车高速状态转向系统抖动分析及优化[D].长沙:湖南大学,2014.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



