沈阳理工大学,辽宁 沈阳 110000
摘要:针对现阶段矿产资源勘探技术的某些问题,如远程遥控问题、小车稳定行进问题、勘探的准确性问题,我们团队运用力学分析、红外光谱等科学方法提供了一定解决方案。
为实现远程稳定遥控,我们采用组网的方案,即多种网络采取串并混联的方式连接操作系统与智能勘探小车,可实现远程稳定遥控;为实现小车稳定地行走,我们采用蟹式爬壁机构,较为合理的分部小车的各个机构使小车重心分部在指定区域,保证在不同行走状态下不会发生侧翻或掉落,实现行进稳定性;为提高勘探的准确性,我们使用红外光谱矿物填图技术,即利用数据客观勾绘矿化蚀变特征,精准识别具有重要找矿意义的蚀变矿物,获取矿物离子交换信息,为区域勘探的准确性做了保证。
最后,我们综合各解决方案,对现有智能勘探小车进行了进一步创新,解决了上诉问题后使勘探变得更准确、快速、稳定。
关键词:远程遥控,稳定性,准确性,组网,蟹式爬壁
矿产资源属于非再生性资源,是影响世界各国经济发展的重要产业,对其进行勘察、开发、利用显得尤为重要。目前另我国在固体矿产资源勘察上虽然取得一定的开发成果,但是在一些问题还没有得到彻底的解决,如无线电干扰问题,如何消除在勘探过程中电磁波信号的接受与传输,小车能否在复杂地貌中行进,如何保证勘探的准确性等。
现有智能地质勘探小车大都存在通信延迟问题,当智能地质勘探小车被用于空间探测或者地质探测时,由于空间距离过大以及电子信号在通信媒介中传播速度的限制,通信延迟对智能地质勘探小车的影响逐步放大,变的非常显著。这种环境下的智能地质勘探小车的控通信模块必须充分考虑通信延迟对远程遥控的影响,为实现远程遥控我们就必须解决通信延迟问题。
问题的产生主要原因是操作遥控距离过大以及电子信号在通信媒介中传播速度的限制。为解决通信延迟问题,已知的最早方案为改变控制器,添加前置补偿环节,从而较少通信延迟时间增加遥控距离。为进一步解决上述问题我们就需要解决遥控距离和电子信号在媒介中的传播速度问题,由于信号的传播速度难以改变,所以我们应该着力解决遥控距离问题。
各矿物质产生的磁场环境会对通信可靠性造成一定的干扰,智能地质勘探小车通过搭载小型微波通信宽带连BDS/CDMA/5G等网络,实现远程计算机与勘探小车的通信对接。智能地质勘探小车使用多种通信方式(5G、专网、WLAN)组网的方案,可以提高勘探小车抗干扰能力和提升通信传输可靠性、实时性。
图2-2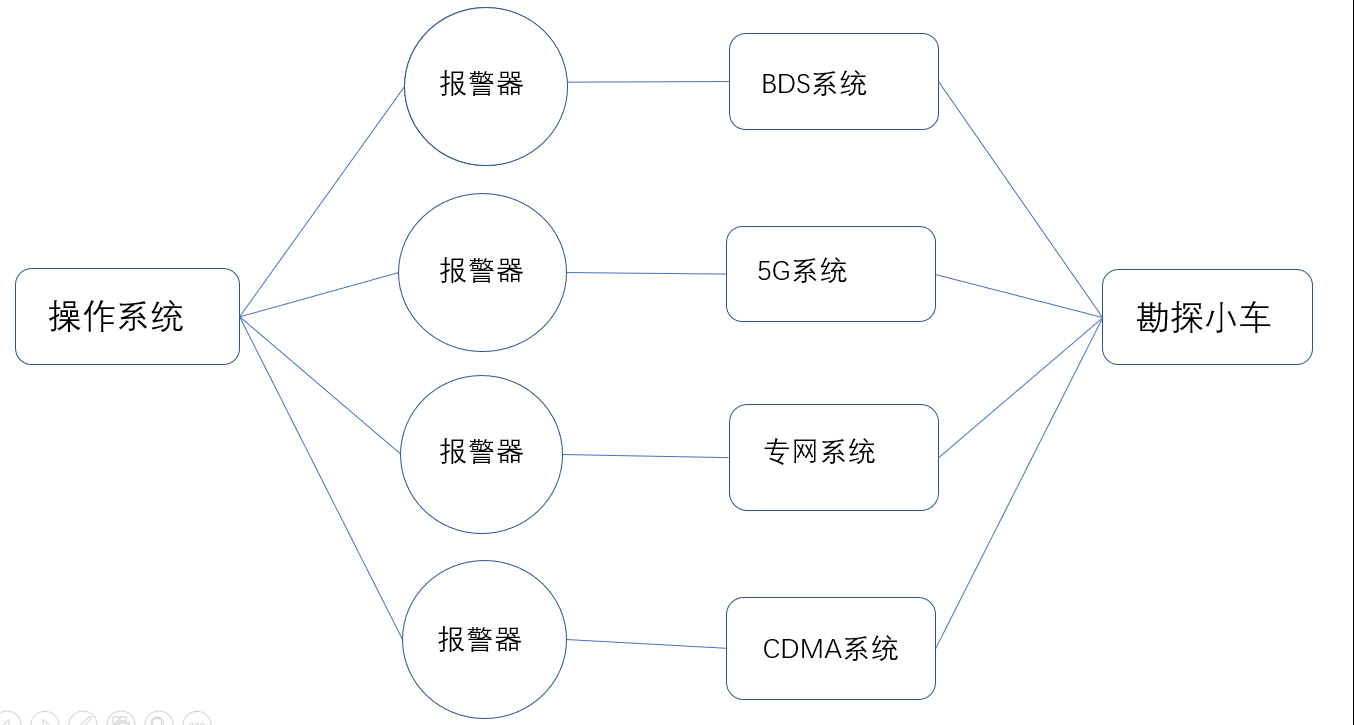 组网示意图
组网示意图
当某一连接方式出现问题时,所在电路会发出警报,提示操作者信号中断,避免了因某一连接方式失败而无法正常工作,在各系统中可以增加信号增强器,使信号可以传输更远,实现远程地稳定地遥控。
研究利用智能地质勘探小车搭载小型微波通信宽带连5G网络,实现远程计算机与勘探小车通信对接。研究基于多种通信方式(5G、专网)的组网方案,提高通信链路抗干扰能力,提升通信传输可靠性。采取串并联混合的组网方案,具有多重在线保持和信号保持用来判断网络是否连接正常,一处出现问题就会报告使用者信号不稳定,具有独特的网络掉线后通知操作系统的功能,保证在网络故障时及时有效地上报情况,更具有多中心服务器备份功能。BDS 定位信息随时精准传输到后台监控服务平台,让远程遥控更稳定、安全。
便携式智能地质勘探小车,主要针对一些人力和大型勘探设备不能到达的复杂地貌而设计。在这些复杂的地貌中小车能否可靠稳定工作就显得尤为重要了。而这其中小车能否在复杂地貌中行进是决定勘探能否成功的重要一环。其中稳定性是其重要的性质,根据该机器人的工作性质,主要涉及平行面行走,斜面行走,和垂直爬壁这三种情况。
假设小车为对称结构以其中心为坐标原点在平行地面或倾角小于30度斜面行走时其重心为
根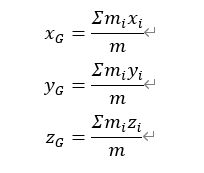
据资料因此只要保证其重心时刻落在图示位置时小车不会侧翻即可保证行进稳定性
对于倾角大于30度的斜面以及垂壁行进可依靠爬壁设备,这种环境下只要其在最极端的垂直行进时能可靠运行,则对倾角大于30度的斜壁也可可靠运行。
针对小车在垂直状态下受力分析其重心为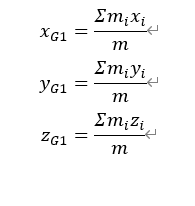
根据文献采用如图所示的8个爬臂依据蟹步交替前行,可保证小车前进运行中的稳定性。
要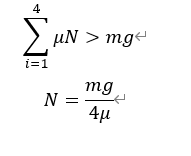
使在行进中不滑落只要滑动摩擦力大于临界值即
假设小车平均高为h则,此时每个机构产生的最小弯矩为
![]()
 假设吸盘功率一定即在吸盘内产生的压强一定为p则吸盘大小为
假设吸盘功率一定即在吸盘内产生的压强一定为p则吸盘大小为
![]() 考虑到小车工作地地貌的不平整性,使每个吸盘的总压强均分到单位平方米的吸盘中,每个微小单元产生的压强至少为
考虑到小车工作地地貌的不平整性,使每个吸盘的总压强均分到单位平方米的吸盘中,每个微小单元产生的压强至少为
这样一来即使遇到不平整地区也可以最大限度保证吸盘工作的可靠性和稳定性。
![]()
![]() 根
根![]() 据以上分析计算可得,要使小车不会发生倾翻或脱落可以稳定正常工作,要求单个吸盘大小为时其产生的吸附力至少为N,产生的力矩至少为Nm。
据以上分析计算可得,要使小车不会发生倾翻或脱落可以稳定正常工作,要求单个吸盘大小为时其产生的吸附力至少为N,产生的力矩至少为Nm。
我国虽然在固体矿产资源勘查上取得一定的开发成果,但遇到复杂的地理环境时作业较难,如:难以勘测的地形或人和大型勘测设备无法进入的这一状况等的勘查研究还具有一定匮乏性。识别地下矿产的分布情况,来准确的确定资源的位置勘察的准确性不高。
红外光谱可有效识别与成矿有关的中低温指示矿物,在野外利用红外光谱仪器开展矿物填图是目前国内外找矿勘查工作中广泛应用的一项高新技术,具有采样密度高、数据量大、效率高、成本低等优势。红外光谱矿物填图技术基于海量数据客观勾绘矿化蚀变特征,精准识别具有重要找矿意义的蚀变矿物,获取矿物离子交换信息并反演热液流体性质,为区域找矿潜力评价及下一步找矿部署提供指导。
红外光谱矿物填图技术的发展方向为工作波段向热红外扩展、设备小型化、提高光谱分辨率,为矿物的勘探、识别提供了较大的便利。
通过不断改进,该智能勘探小车具有以下创新性:
1.采取串并联混合的组网方案,具有多重在线保持和信号保持用来判断网络是否连接正常,使远程遥控更安全、稳定;
2.采用仿生机械爬臂,极大的增强了,小车的行走和爬壁能能力,提高了小车在工作中的稳定性;
3.各个机构的精确安装,减小了小车的体积,简化了小车的结构,使小车在工作时更加可靠灵活;
4.矿物识别采用红外光谱矿物填图技术,红外光谱仪器开展矿物填图技术具有采样密度高、数据量大、效率高、成本低等优势,在极端天气条件下,信号强度不会减弱,可以更好的传输到接收系统中,各个方面的信号都会完美接收,不容易出现信号中断的现象。
大学生创新创业训练计划资助
[1]李海峰,王伟文,欧希野,郭志刚,阳薇.计算机远程操作输电线路巡线机器人系统研究及应用要点[J].工程技术研究,2019,4(20):108-109.
[2]杨春,罗天洪.一种新型爬壁机器人越障过程的运动及动力学分析[J].机械传动,2019,43(09):87-92+95.
[3]苗智英,李瑞琴,张启升,梁晶晶,孟宏伟,梁世杰.3-PUU轮腿式移动机器人的步态与稳定性分析[J].机械传动,2018,42(03):90-93
[4]田昊.智能勘探技术应用现状与前景[J].建筑技术开发,2018,45(01):83-84
[5]赵一名. 虚拟现实技术在建设机器人远程操作中应用的研究[D].吉林大学,2014.
[6]阎石.数字电子技术基础.北京:高等教育出版社.1983
[7]罗亚非等.凌阳16位单片机应用基础.北京:北京航空航天大学出版社.2003

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



