青岛黄海学院 山东 青岛 266427
摘要:发展海洋经济是21世纪重要的战略政策,维护广大渔业的安全,能够有效的促进海洋经济的平稳发展,为建设海洋强国打下坚实的基础。在海洋养殖的过程中,因疾病死亡的鱼类漂浮在水面上,会导致致病细菌的传播,且海洋水面上漂浮的垃圾也会成为致病细菌的传染源,严重影响了海洋渔业的健康发展。目前现有的技术多采用人工划船或者站在浮筒上打捞,死亡的鱼类或垃圾的回收效率极低。因此,本项目设计了一种多功能海洋养殖自动巡检船,它能够有效地处理海洋上的漂浮垃圾,并且配有摄像头,可便于观察巡检船所处的环境。该巡检船结构设计合理,制造成本低廉,可有效代替人工打捞,即省时又省力,并且安全可靠,操作灵活,能够有效的对死亡的鱼类或垃圾进行回收。该巡检船能够结合具体水域环境,进行有效的路径规划,大大的提高了死亡鱼类或垃圾的清理效率,节约了人力资源,具有广阔的市场空间,因此该船具有较高的现实价值。
关键词:死亡的鱼类;漂浮垃圾;省时省力;智能
A multifunctional automatic patrol boat for marine culture
Tian Zhonghua
(266427 QingDao HuangHai College Shandong Qingdao)
Abstract: the development of marine economy is an important strategic policy in the 21st century. It can effectively promote the steady development of marine economy and lay a solid foundation for the construction of a maritime power. In the process of marine aquaculture, fish died of disease floating on the water surface will lead to the spread of pathogenic bacteria, and floating garbage on the sea surface will also become the source of infection of pathogenic bacteria, seriously affecting the healthy development of marine fisheries. At present, most of the existing technologies are manual rowing or fishing on pontoons, so the recovery efficiency of dead fish or garbage is very low. Therefore, this project designs a multi-functional automatic inspection ship for marine culture, which can effectively deal with floating garbage on the sea, and is equipped with a camera, which can easily observe the environment of the inspection ship. The structure design of the inspection ship is reasonable, the manufacturing cost is low, it can effectively replace the manual fishing, that is, time-saving and labor-saving, and safe and reliable, flexible operation, can effectively recycle the dead fish or garbage. The inspection ship can carry out effective path planning combined with specific water environment, greatly improve the cleaning efficiency of dead fish or garbage, save human resources, and have a broad market space, so the ship has high practical value.
Key words: dead fish; floating garbage; saving time and effort; intelligence
1引言
近年来,随着人们生活水平的不断提升,我国对高端海产品的需求量也越来越大,而长期以来的过度捕捞难以为继,使得我国每年都需要花费数百亿元对外进口海产品,造成了我国的储备大量外流。因此,我国已开启海洋牧场发展规划的研究,为我国海洋生态环境的建设与发展指明了方向。
随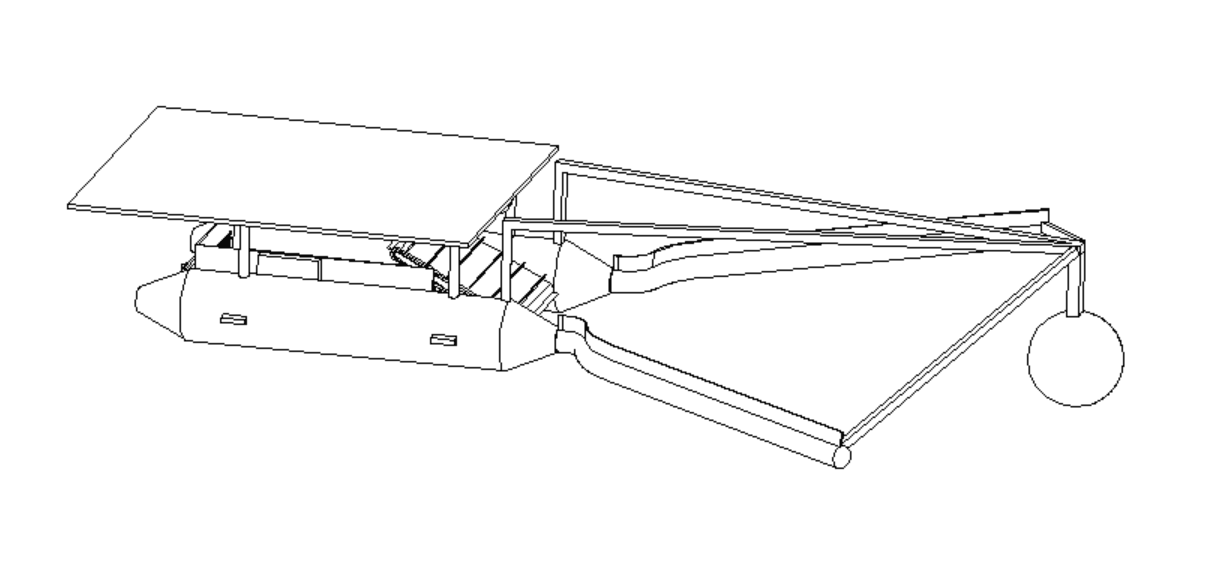
着目前科学技术的不断发展,使得渔牧业的发展越来越趋向于智能化与信息化,其中互联网技术融合渔业发展更是成为了全球近海国家重要的研究方向。在水产养殖业方面,欧美等发达国家早已开展渔业的智能化生产研究,其中GPS自动导航技术、云平台技术以及远程监控技术在提升水产品养殖业效益的方面做出了重要贡献。在当前阶段,我国的无人作业船和远程监控系统的研究都相对落后,因此,我们设计出这个多功能海洋养殖自动巡检船。该设备能够节省人力操作、实现远程控制作业、自动作业、智能作业,因此具有很大的市场前景。
多功能海洋养殖自动巡检船适用于中小型渔场,可以打捞海面上的大部分漂浮垃圾,如塑料瓶、包装袋、死亡的鱼类等。在使用时,只需将巡检船投放到固定的工作水域,工作人员可在岸边进行远程遥控,完成垃圾清理后,可通过吊放装置将船回收,流动利用,方便快捷。也可以停放在某一特定域,即可使其进行定期清理,又可以免除来回运输等麻烦。通过对巡检船,操作灵活,监测方便,垃圾收集效果好为目的,我们设计海洋养殖巡检船,用以实现渔牧业健康有效的发展。
2系统结构
多功能海洋养殖自动巡检船主要由船体、主控模块、动力模块、太阳能模块、GPS 定位模块、摄像模块、垃圾收集模块组成。为了尽可能地扩大海面漂浮垃圾的收集范围,提高漂浮垃圾的收集效率,并增加船体的稳定性,巡检船采用了两侧对称布置、船体中部空置的双船体结构。双船体由两个流线型船体、四个连接板组成。将垃圾收集船放入水中,打开位于船尾上的开关,当示灯亮时,说明电路系统已进入工作状态。位于船上的摄像头将开始工作,船上的摄像头会将船体周围的环境实时传送到云平台,供养殖者了解海上情形,养殖者可以通过蓝牙遥控,当监测到前方有漂浮物时,通过遥控驱动船尾处的螺旋推进器前行,向漂浮物靠近,当船与漂浮物之间的距离为 0 时,通过船前的漂浮物聚拢机构将垃圾导流进入垃圾箱内,以此完成垃圾的收集。 该项目结构设计合理,操作灵活,打捞死角小,智能化程度高,垃圾收集效果好且效率高。
图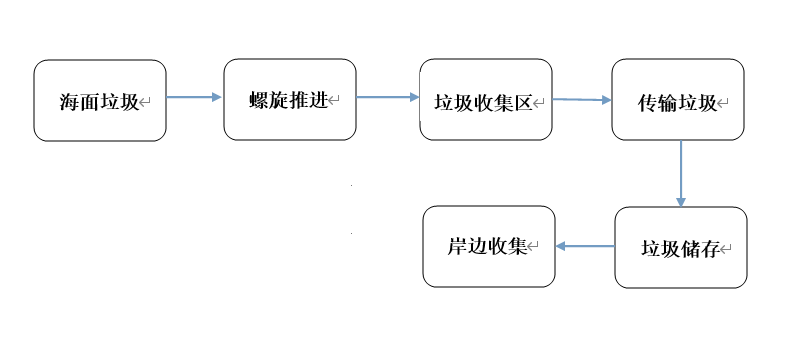
1船体结构图
图2系统整体结构框图
3整体设计[2][3]
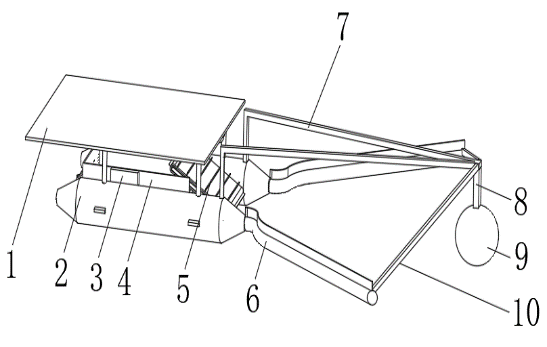
多功能海养殖巡检船浮动组件包括箱体4和两个浮筒2,箱体4的上端开口设置,两个浮筒2分别固定在箱体4宽度方向的两侧,箱体4长度方向的一端安装有输送机5,输送机5的一端位于箱体4外侧且倾斜向下,输送机5的另一端位于箱体4内腔的上方;浮筒2使箱体4漂浮在海面上。
浮筒2靠近输送机5的一端固定有支撑架7,支撑架7远离浮筒2的一端安装有两组拦阻件,支撑架7对拦阻件进行支撑,拦阻件包括软浮动管6和斜杆10,软浮动管6的一端和浮筒2靠近输送机5的一端连接,软浮动管6的另一端和斜杆10的一端固定连接,斜杆10的另一端和支撑架7远离浮筒2的一端固定连接,两个软浮动管6向外扩张,软浮动管6未处于绷紧状态来适应波动的海面。箱体4上固定有防水箱3,防水箱3内设置有电源17和控制器18,电源17的输出端和控制器18的输入端电连接,控制器18的输出端分别与输送机5的输入端和电动螺旋桨14的输入端电连接。
控制器18控制输送机5、电动螺旋桨14的方式均为现有技术中常用的方法;所用控制器18为stm32单片机。
输送机5包括驱动电机、筛网带和两个支撑辊,两个支撑辊对筛网带支撑,且驱动电机驱动其中一个支撑辊旋转,从而带动筛网带旋转,筛网带将海水中的死鱼或垃圾移动到箱体4内;筛网带外侧设有若干个阻挡板,阻挡板便于垃圾或者死鱼随筛网带移动。
两个浮筒2对箱体4提供浮力,使箱体4漂浮在海面上,控制器18控制电动螺旋桨14工作,电动螺旋桨14驱动本多功能海洋养殖自动巡检船在海面上移动,控制器18控制输送机5工作,输送机5将海面漂浮的死鱼或者垃圾从海水中移动到箱体4中。
支撑架7的一端固定在浮筒2上,支撑架7的另一端通过斜杆10使两个软浮动管6张开,两个软浮动管6增大本多功能海洋养殖自动巡检船收集垃圾的范围。
 软浮动管6可随海面的起伏而形变,软浮动管6能够适应波浪起伏的海面,软浮动管6始终和海面贴合,保证对海面垃圾的清理效率。
软浮动管6可随海面的起伏而形变,软浮动管6能够适应波浪起伏的海面,软浮动管6始终和海面贴合,保证对海面垃圾的清理效率。
图3结构示意图
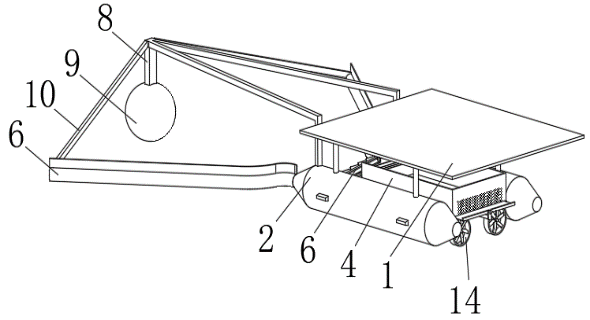
图4侧视结构示意图
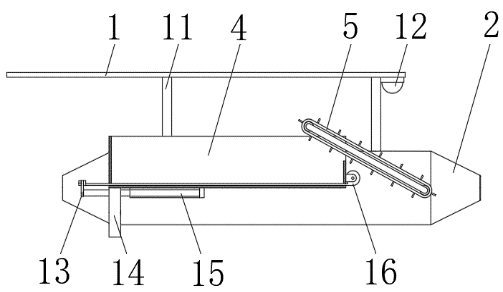
图5局部剖视结构示意图
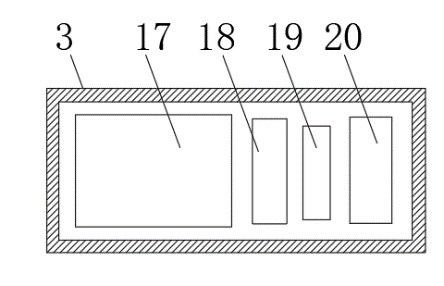
图6防水箱的局部剖视结构示意图
3.1船螺旋推进器设计[4]
推进器是整个船的动力系统,它的作用是给船提供前行的推力,使船前进,它是把电能,风能转换为船推力的机械能。推进器按作用方式可以分为主动式和反应式。通过人力或风力驱动船体前进的称为主动式,船浆、明轮、喷水推进器、螺旋浆等称为反应式。目前船类应用最广泛的是螺旋桨。
根据船体的结构特点以及蓄电池的供电特点,我们采用电动螺旋推进器,该类推进器实用性性强,结构简单,使用方便,应用范围广。螺旋推进器是一种比较新颖的动力推进器,具有体积小、推力强、能量转换率高、无噪音等特点,改推进器还具有绿色环保,易于调试,维护简单的特点,是一些小型船体动力的首选产品,比较符合本设计的功能需求。
3.2蓄电池的选择[4]
蓄电池也称二次电池,是将所获得的电能以化学能的形式贮存并可将化学能转化为电能的一种电学装置。蓄电池按电解质不同,通常分为碱性蓄电池和酸性蓄电池。近年来,由于交通、通讯、计算机产业的高速发展,其产品系列、产品种类、产品性能发生巨大变化,以满足不同用途的需要。蓄电池主要应用于各种车辆、船舶、飞机等内燃机的起动以及照明、点火、蓄能、应急电源、电话交换机、不间断电源、移动通讯、计算机、电子、仪表、便携式电动工具、电动玩具中等。
鉴于该作品设计的目的是研制一种具有环保、高效、技术先进的海洋养殖巡检船,故选用蓄电池作动力源。蓄电池在此次设计中有两方面的作用,一方面是带动螺旋推进器,以实现船在水中的行驶和转向;另方面是驱动电机,进而带动垃圾输送装置以实现垃圾的输送。
在整理资料后选取蓄电池型号为统一蓄电池200AH(150AH),该蓄电池绿色环保电池容最大,比容最高,集电效率和强度高,性能稳定,电池的使用寿命长。
3.3 传送带总体设计[3][4]
传输装置是通过驱动电机,将海面上的漂浮垃圾传输至垃圾存储装置。根据双船体的构造原理,将传输装置放置在两船体之间。
鉴于该传输装置的前端装有漂浮物聚拢机构,考虑到要避免弹性滑动和打滑,故选用链传动。整个传输装置设计为齿轮与链条之间的传动,通过链条带动传输带的传动方式。连接形式与传送带之间用螺栓进行固定,为保证水面垃圾能运输到船体内部,因此将传送带焊上一些倒钩,以确保垃圾能准确进入垃圾箱内。
4 具体实施方式[1][2][3]
结合图3至图6所示,本实用新型提供的一种多功能海洋养殖巡检船的具体实施方式如下。
多功能海养殖巡检船其结构具体包括1太阳能电池板、2浮筒、3防水箱、4箱体、5输送机、6软浮动管、7支撑架、8支杆、9浮球、10斜杆、11支撑杆、12摄像头、13连接块、14电动螺旋桨、15防水电动伸缩杆、16布卷筒、17电源、18控制器、19无线通信模块、20 GPS模块。
箱体4内腔靠近输送机5的位置堆满垃圾后,通过控制器18控制防水电动伸缩杆15伸长,防水电动伸缩杆15通过连接块13带动布卷筒16布伸出的一端移动,箱体4内的布带动箱体4内的垃圾移动,使箱体4内继续盛放垃圾。
外部的控制器与无线通信模块19进行无线通信,摄像头12拍摄的视频信号通过控制器18、无线通信模块19传输到外部的控制器上,便于观察本功能海洋养殖自动巡检船所处的环境;控制器18通过GPS模块20检测本多功能海洋养殖自动巡检船所处具体位置。
外部的控制器可以控制输送机5、摄像头12、电动螺旋桨14、防水电动伸缩杆15工作,实现本功能海洋养殖自动巡检船的远程控制。
软浮动管6的上侧固定有向上设置的软挡板,软挡板沿软浮动管6的长度方向设置;软挡板增强软浮动管6高度方向的拦截距离,软挡板提高软浮动管6拦截垃圾的效率。
支撑架7远离浮筒2的一端和支杆8的上端固定连接,支杆8的下端固定有浮球9;浮球9通过支杆8对支撑架7进行支撑,避免本多功能海洋养殖自动巡检船前倾,保证本多功能海洋养殖自动巡检船的稳定性。
5 结束语
本研究针对目前我国海养殖业的发展需求而制定的,随着生活水平的不断提高,人们对高端海产品的需求量越来越高。目前我国已开启海洋牧场发展规划的研究,因此,海养殖业的发展空间逐渐变大。伴随海养殖业所应用到的各种设备的需求也逐渐变多,所以说海洋养殖巡检船具有很大的市场空间。这次实践培养了我的动手能力,使我受益匪浅。整个过程对我来说,不仅是专业知识的再-次巩固 和加深,同时也让我深入了对soldworks, AutoCAD等绘图软件的学习,我会在今后的工作与学习中,继续努力,不断丰富自己的知识。
参考文献:
[1]朱林,汪武刚,杨帆,齐福年,薛凯峰.一种基于STM32单片机的无人垃圾清理船[J].科技视界,2019(29):31-32.
[2]黄晓雪,史洪德.垃圾清理船总体设计研究[J].内燃机与配件,2019(07):195-196.
[3]胡汝刚,朱凤仪,杜训柏.一种单点系泊式抗风浪养殖船的设计[J].水产养殖,2018,39(06):4-5.
[4]黄飞,毛罕平,缪小花.池塘养殖船自动导航系统的设计与研究[J].农机化研究,2015,37(04):117-120.
通信作者: 田中华
基金项目:2020年国家大学生创新创业训练计划项目
项目编号:S202013320039
基金项目:2020年青岛黄海学院科技创新活动项目
项目编号:HHKJCX2060

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



