上海勘察设计研究院集团有限公司 上海市 201615
摘要:对于大面积的立面平整度测量,采用传统方法,费时费力而且测量成果的丰富度不够,无法全面的表现立面平整度,单独采用三维激光扫描仪,则需要顾及标靶配准精度,本文采用任意设站控制网配合三维激光扫描仪,对大面积立面进行了平整度测量,通过工程实例的检验,证明方法有效可靠。
关键词:平整度测量,三维扫描,任意设站控制网
前言
某些项目会要求测量单位对立面的平整度进行测量,传统的方法是采用全站仪免棱镜模式进行测量,但是这种方法有一定的局限性,即测点的密度不够,无法真实的表现立面的平整度情况,尤其是遇到大面积的立面,如果要按照一定密度来采集,费时费力,效率极低。激光三维扫描仪提供了一个新的解决途径,它可以大面积、高分辨率地快速获取物体表面任意点的空间坐标,大量、密集的点信息可以完整的表现立面的平整度情况。但是,激光三维扫描仪的测程较短,在面对大范围的区域时,就必须借助标靶进行配准。这时,标靶的精度又成为制约平整度测量精度的重要因素。。
因此,本文介绍一种采用任意设站控制网配合三维激光扫描测量平整度的方法,有效的解决了该问题。
工程概况
某工程项目需新建一座水池,该水池长度438m,宽度18m,池深10.3m,水池设计精度要求高,对水池壁的平整度、垂直度、平行度等都有明确的技术要求。
具体的施工精度要求如下:
池顶往下3400mm的高度范围并且在水池设备端前50m的长度范围内,水池南侧内壁及北壁分别相对于水池中纵剖面的平行度均≤5mm;
池顶往下3400mm的高度范围并且在水池设备端前50m之外的长度范围内,水池南侧内壁及北侧内壁分别相对于水池中纵剖面的平行度均≤10mm;
池顶往下3400mm至池底的高度范围内,水池南侧内壁及北侧内壁分别相对于水池中纵剖面的平行度均≤20mm;
池顶往下3400mm的高度范围内,水池长边两侧内壁任意5m长度范围内的平面度≤5mm。
业主方要求在水池施工结束后,对水池的整体精度质量情况进行一次完整的检测,重点对水池壁的平整度、垂直度、平行度等指标进行复验。
实施方案
该项目的难点
1、水池体积大,水池壁的总面积约9393m²,如果按照常规的全站仪免棱镜的测量方法,即使是按照0.25m*0.25m的方格网测量,也需要150298个测点。
2、水池的精度要求比较复杂,精度指标并不是一个,而是根据区域对应不同的精度指标。
3、测量精度要求高,水池的部分区域精度要求≤5mm。
显然,如果采用传统的方法,是无法满足项目需求的,而采用三维扫描法,无法一站完成测量,必须多站拼接,因此要考虑标靶配置误差,所以在控制测量时必须要考虑控制标靶的测量精度。本文采用采用任意设站控制网配合三维激光扫描的方法,解决以上问题。
仪器
为满足测量精度要求,使用Z+F IMAGER 5010C三维激光扫描仪以及Leica TM50全站仪作为数据采集仪器。
测量方法
控制测量
控制网起算点于水池施工控制点,以保证施工测量和验收测量的基准一致,整个水池顶部共布设5个CPIII起算点,均采用强制对中形式,这5个点均匀分布在水池范围内。
起算点平面控制采用按四等导线测量的要求,将坐标直接引测至水池顶部。
起算点高程控制,地面段采用二等水准测量,然后,采用不量仪器高和棱镜高的中间设站电磁波测距三角高程法将高程值引测至水池顶部的起算点上。
CPIII测量
本项目任意设站控制网测量的控制网布设,参照《城市轨道交通工程测量规范》(GB/T50308-2017)要求。
1)标靶布设
标靶的布设是依据现场环境、扫描仪架站位置和扫描范围,按水池长度约每20m间隔位置布设标靶,高度为水池底板向上2m处,整个水池共布设40个标靶。标靶纸的中心点为全站仪测量瞄准的位置,也是三维扫描标靶拼接的标志点。
2)任意设站控制网沿着水池长度方向,按20~30m的间隔进行设站,共架设20站,在每个任意测站观测不少于3对标靶纸坐标点,其中重复观测点不少于2对。高程测量采用任意设站三角高程测量方法,与平面测量同时进行。观测技术要求参照《城市轨道交通工程测量规范》(GB/T50308-2017)要求施测。
外业成果检查合格后进行平差计算,平面坐标平差时,先进行独立自由网平差,再使用起算点进行固定约束平差。高程平差时,采用严密平差。最终得到所以标靶的三维坐标值。以此作为多站拼接的依据。
三维扫描
在进行扫描之前,需对扫描区域进行现场踏勘,主要考察内容包括所需扫描实体以及周边情况。考察扫描主体体量大小,确定控制所需的标靶纸布设位置,确定扫描仪架站位置以及是否需要多站扫描。整体池壁长约400m,共设20站进行扫描。综合考虑扫描的采样密度、扫描时间,确定采样点间距。在仪器在扫描操作时,尽量避免风,施工机械影响等造成的三脚架的晃动。
1)、点云数据预处理
数据预处理包括:点云数据配准及坐标系转换、降噪与抽稀。
首先在点云数据处理软件中,识别各个架站的标靶,获取其在扫描仪坐标系下的三维坐标,同时依据标靶纸上的编号,将任意设站控制网测量得到的标靶三维坐标进行一一对应,依据坐标转换公式,求解得到转换参数后,将所有扫描数据转换至城市坐标系下。依据城市坐标系与独立坐标系的关系,将所有点云数据转换至独立坐标系下,完成点云数据的坐标转换。
然后,采用人机交互的方法删除冗余点,过滤异常点和离群点。同时,为了降低计算机对于海量点云数据处理的运算量,对点云数据进行进一步的压缩。
对水池内壁整体点云南、北立面分别进行平面拟合,拟合函数方程为:

根据上式对水池内壁点云数据进行最小二乘拟合,其中c值即为立面的垂直度。
计算所有点云数据到基准面的差值作为偏差值,并依据池壁精度要求的不同,对不同区域的池壁采用等值线的表达方式分析池壁平整度,偏差值为点云到基准面的差值,以5mm作为偏差值的等值间隔,并设定向水池内侧偏移为正,水池外侧偏移为负。最后利用颜色填充的方式表达其超限的区域。

图 4 部分区域池壁偏差等值线图
图中:蓝色代表负值,表示向水池外侧偏移,颜色越深,表示偏移量越大;
橘红色代表正值,表示向水池内测偏移,颜色越深,表示偏移量越大;
绿色代表,偏差值在容许范围内。
精度验证
标靶精度
任意设站控制网共观测20站,观测178个方向及距离,整体平差后,标靶坐标,最弱点的点位中误差为2mm,平均点位中误差为1mm,验后单位权中误差为1.46mm,标靶控制网整体满足精度要求。
三维扫描验证
为保证三维扫描仪的测量精度,通过全站仪抽测手段验证扫描仪的测量精度,采用TM50全站仪沿水池长度方向依次采集20个垂直断面,断面间距基本保持一致。
1)、垂直度验证
根据全站仪测量的所有断面点坐标计算水池的整体垂直度,并与扫描仪获取点云数据整体拟合得到的整体垂直度进行对比分析,结果如下表所示:
北侧池壁,扫描仪整体垂直度:-1.4‰,全站仪整体垂直度:-1.2‰,差值:0.2‰。
南侧池壁,扫描仪整体垂直度:-0.03‰,全站仪整体垂直度:-0.02‰,差值:0.05‰。
注:+代表向水池内侧倾斜,-代表向外侧倾斜。
2)平行度验证
分别计算全站仪各实测断面点相对于基准面的平行度,同时求解相同位置处,扫描仪实测点相对于基准面的平行度,通过对比分析两种仪器获取平行度的差值,评价三维扫描仪的测量精度。
全站仪与扫描仪获取的平行度差值统计图如下所示。
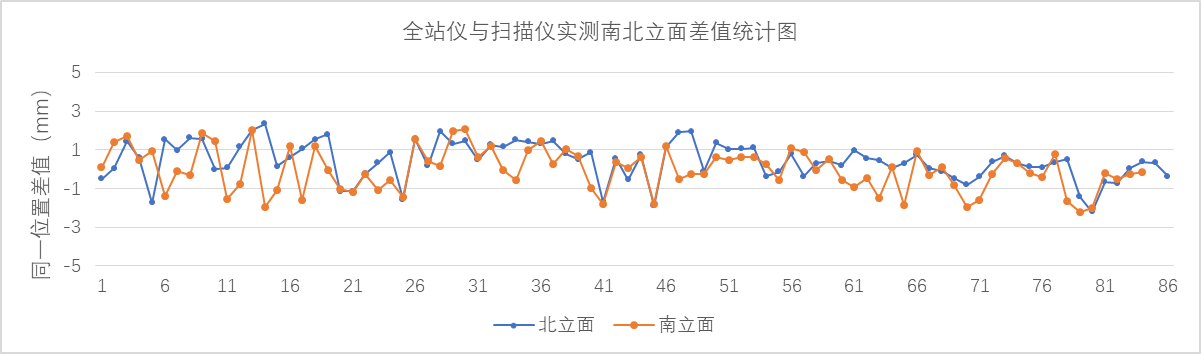
图 5 全站仪与扫描仪实测南北侧池壁差值统计图
结论
通过本项目,证明采用任意设站控制网配合三维激光扫描仪完全可以进行大范围的立面平整度测量,该方法精度有保障,成果数据丰富,是目前比较有效的立面平整度测量方法。
参考文献:
1、《城市轨道交通工程测量规范》GB/T 50308-2017
2、《地面三维激光扫描作业技术规程》(CH/Z 3017-2015)
3、《基于三维激光扫描技术的隧道检测技术研究》[J].王令文,程效军,万程辉,工程勘察.2013(07)
4、《多片点云数据拼接处理技术的研究》[J].刘尚巍,朱小超,张永光,魏群,水利与建筑工程学报,2014(01)
5、《CPIII测量技术在高铁精密控制网中的应用》[J].徐文星,黑龙江科技信息,2016(13)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



